by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Parametric Design
Introduced first in SolidGeometry 5.4, Creation date: 2024-05-07, Last change: 2025-09-15
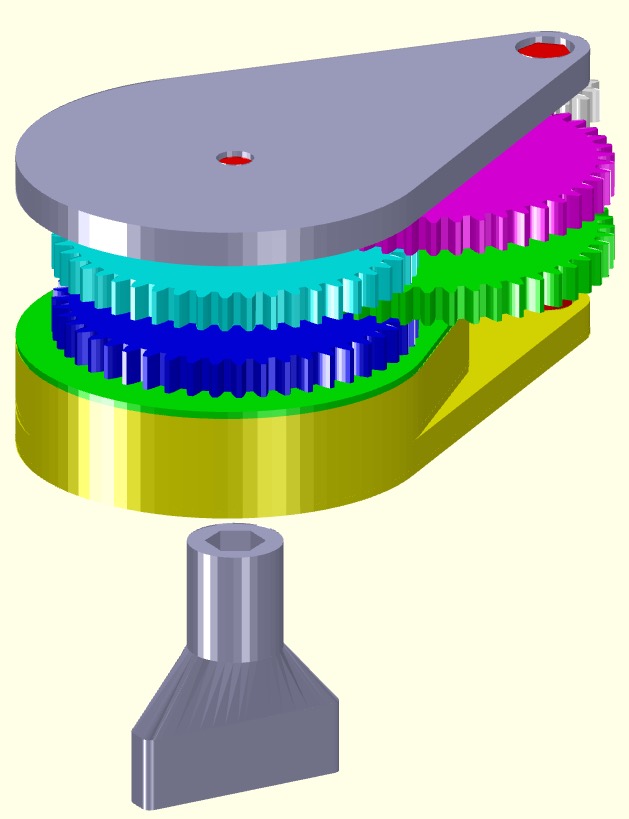
SGall=SGmotorwindup([SP,AX,fgns,"nocage","axis4","frontw","STL","anime","P"])
SP: | Springparameter as in SGspringSpiral; default is [30,5,0.8,5] | |
AX: | Axis description such as last parameter in SGspringSpiral; default is [6.4 6 5 0] | |
fgns: | gear ratio and stack level; default is [0 3]; 0 stands for default values | |
"nocage": | if used the gears are not covered by the rack | |
"axis4": | if used and value <>0 a 4th axis is integrated into the housing with shaft geometry | |
"frontw": | if used in combination with axis4 it has front wheel drive | |
"STL": | if used a directory with all parts is written to desktopdir | |
"anime": | if used without STL it animates the motor |
SGall: | Cell list of parts |
SGmotorwindup(30,'stl','nocage'); % design a minimum size motor
SGmotorwindup(30,'anime'); % animate the gear movemebts
SGmotorwindup(30,'axis4',50); % this is now a car not only a motor
SGmotorwindup(30,'axis4',50,'nocage'); % now the gear is not covered
SGmotorwindup(30,'',[25 3],'axis4',50,'nocage'); % ration 25 on 3 levels