VLFL_Toolbox_test (tnr)- publishes all tutorials to test the compliled Toolbox version |
 | % VLFL_Toolbox_test (tnr) - publishes all tutorials to test the compliled Toolbox version % (by Tim Lueth, VLFL-Lib, 2017-JAN-25 as class: FILE HANDLING) % % Introduced first in SolidGeometry 3.3 % % See also: VLFL_Toolbox_make % % VLFL_Toolbox_test([tnr]) % === INPUT PARAMETERS === % tnr: optional list of test; default is 1:43 % % See also: VLFL_Toolbox_make % % % Copyright 2017-2018 Tim C. Lueth |
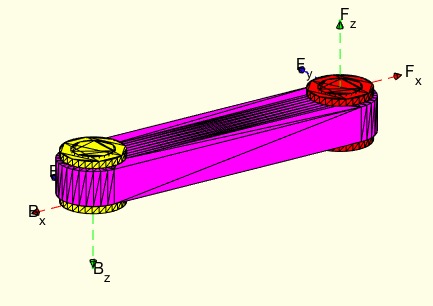
exp_2017_01_22- EXPERIMENT to create a arbitrary Universal Spatial Link between two frames |
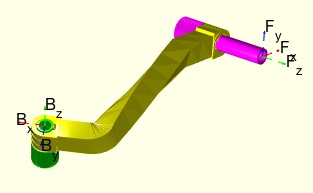 | % exp_2017_01_22 - EXPERIMENT to create a arbitrary Universal Spatial Link between two frames % (by Tim Lueth, VLFL-Lib, 2017-JAN-22 as class: EXPERIMENTS) % % exp_2017_01_22 % |
VLFL_EXP26- Tutorial for using universal planar links |
 |
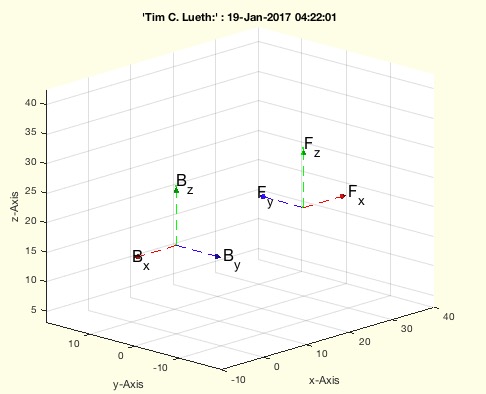
exp_2017_01_19- |
 | % exp_2017_01_19 - % (by Tim Lueth, VLFL-Lib, 2017-JAN-19 as class: EXPERIMENTS) % % exp_2017_01_19 % |
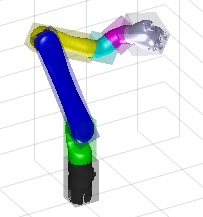
SGTframeplot(SGN,N,SN,pf,s)- plots one ore more frame of a solid |
 | % SGTframeplot(SGN,N,SN,pf,s) - plots one ore more frame of a solid % (by Tim Lueth, VLFL-Lib, 2017-JAN-18 as class: SURFACES) % % In contrast to SGplot, this fnctn does plot only the named frames % In SG-Lib 5.0 it behaves as promised ;-) % In SG-Lib 5.0 Wild cars are possible % SGTframeplot(B,{'M8','M3'}); plots all frames that start with M8 and % with M3 % (Status of: 2020-12-17) % % Introduced first in SolidGeometry 3.3 % % See also: SGTget, SGTset, SGTplot, SGTremove, SGTui % % h=SGTframeplot(SGN,[N,SN,pf,s]) % === INPUT PARAMETERS === % SGN: Solid Geoemtry % N: Name of the frame to plot, default is all % SN: Solid Descriptor for frame names; default is []; % pf: if true; TFiL is plotted if exists; default is true; % s: size for frames to plot; default is sofBB(SGN)/5 % === OUTPUT RESULTS ====== % h: Called Frames % % EXAMPLE: % loadweb JACO_robot.mat; % SGfigure; SGTframeplot(JACO); % SGfigure; SGTframeplot(JACO,'B'); % SGfigure; SGTframeplot(JACO,{'B','F'},'JACO'); % % See also: SGTget, SGTset, SGTplot, SGTremove, SGTui % % % Copyright 2017-2022 Tim C. Lueth |
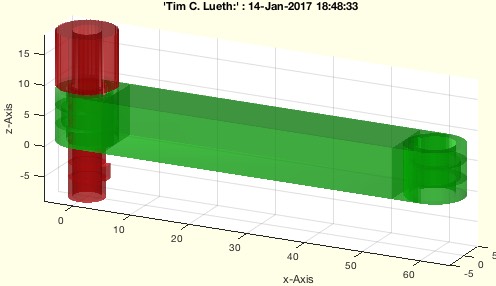
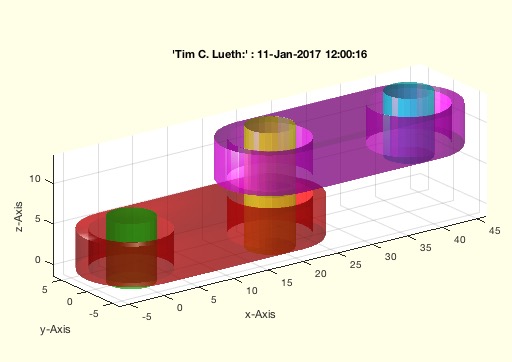
SGmodelLink2(L,L1,L2,K,H)- Creates Solid for a Link im Style "Link2" |
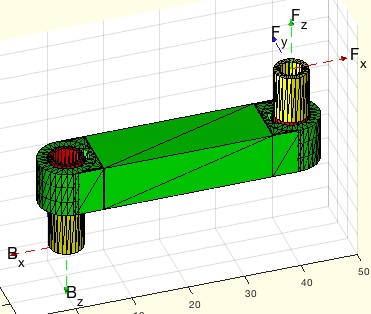 | % SGmodelLink2(L,L1,L2,K,H) - Creates Solid for a Link im Style "Link2" % (by Tim Lueth, VLFL-Lib, 2017-JAN-18 as class: MODELING PROCEDURES) % % Notation style % 0= same level % +n = n* Height H above z plane % -n = n* height H under z plane % Knob Position % 'BU' = Base frame upper side % 'BL' = Base frame lower sider % 'FU' = Follower Frame upper side % 'FL' = Follower Frame lower sider (Status of: 2018-07-29) % % Introduced first in SolidGeometry 3.3 % % See also: SGmodelLink, SGmodelJoint, SGmodelNode, SGmodelLink3, % SGmodelKeyhole, SGmodelLink1 % % [SG,SGA,SGB]=SGmodelLink2([L,L1,L2,K,H]) % === INPUT PARAMETERS === % L: Length % L1: Level of Frame B; default is 0 % L2: Level of Frame F; default is 1 % K: Knob position; default is '' % H: Height of link; default is 9 % === OUTPUT RESULTS ====== % SG: Solid Geoemtry including Frames % SGA: SG of Bearing of Start Joint % SGB: SG of Bearing of End Joint % % EXAMPLE: % A=SGmodelLink2('',0,2);SGaddrelSG(A,A,'alignT',{'B','F'}); % A=SGmodelLink2('',0,1);SGaddrelSG(A,A,'alignT',{'B','F'}); % A=SGmodelLink2('',0,-1,'BL,FU');SGaddrelSG(A,A,'alignT',{'B','F'}); % % See also: SGmodelLink, SGmodelJoint, SGmodelNode, SGmodelLink3, % SGmodelKeyhole, SGmodelLink1 % % % Copyright 2017-2018 Tim C. Lueth |
exp_2017_01_14- EXPERIMENT for printing a fourbar linkage |
 | % exp_2017_01_14 - EXPERIMENT for printing a fourbar linkage % (by Tim Lueth, VLFL-Lib, 2017-JAN-14 as class: EXPERIMENTS) % % See also: SGmodelKeyhole, exp_2017_01_11, exp_2016_12_31, exp_2016_12_27 % % exp_2017_01_14 % |
SGwriteMultipleSTL(SG,FNAMEFNAME,ONAME,Partext)- writes a cell list of solid geometry in different STL files |
 | % SGwriteMultipleSTL(SG,FNAMEFNAME,ONAME,Partext) - writes a cell list of solid geometry in different STL files % (by Tim Lueth, VLFL-Lib, 2017-JAN-14 as class: FILE HANDLING) % % Introduced first in SolidGeometry 3.3 % % See also: SGwriteSTL, SGwriteSeparatedSTL, SGreadSTL, % SGanalyzeGroupParts, SGarrangeSG, SGpartslist, sprintftext, % SGpartsfuncparams, SGpartslistastext % % ndir=SGwriteMultipleSTL(SG,[FNAMEFNAME,ONAME,Partext]) % === INPUT PARAMETERS === % SG: A cell list of different solids for different file % FNAMEFNAME: optional file name % ONAME: optional text name % Partext: Partslist as text string, create by SGpartslistastext % === OUTPUT RESULTS ====== % ndir: new directory % % EXAMPLE: % [AParts]=SGpartslist('',SGpartsfuncparams); %% RECORD THE PARAMETERS USED % AParts=SGpartslist(AParts,sprintftext(1,' DIN7991 Screw ',2.5,'x',6,'mm')) % ADD A LINE % SGwriteMultipleSTL({SGbox},'','',SGpartslistastext(AParts)); % WRITE PARTS LIST % % % See also: SGwriteSTL, SGwriteSeparatedSTL, SGreadSTL, % SGanalyzeGroupParts, SGarrangeSG, SGpartslist, sprintftext, % SGpartsfuncparams, SGpartslistastext % % % Copyright 2017-2022 Tim C. Lueth |
depuseTL(fname)- return which fncts in the current directory uses a named fnct |
 | % depuseTL(fname) - return which fncts in the current directory uses a named fnct % (by Tim Lueth, VLFL-Lib, 2017-JAN-13 as class: AUXILIARY PROCEDURES) % % in most cases "depuseString" is much faster but cannot distinguish code % and comments and strings that are part of strings. depuseTL uses % depuseString (which grep) before using % matlab.codetools.requiredFilesAndProducts (Status of: 2019-06-20) % % Introduced first in SolidGeometry 3.3 % % See also: depuseTL2013, depuseString % % a=depuseTL(fname) % === INPUT PARAMETERS === % fname: fnctn to search for % === OUTPUT RESULTS ====== % a: list of fnctn % % See also: depuseTL2013, depuseString % % % Copyright 2017-2019 Tim C. Lueth |
SGbreakCorners(SG,vi,k,sf)- breaking the vertices of a solid geoemtry |
 | % SGbreakCorners(SG,vi,k,sf) - breaking the vertices of a solid geoemtry % (by Tim Lueth, VLFL-Lib, 2017-JAN-13 as class: MODELING PROCEDURES) % % WORK in PROGRESS - NOT SATIFIYING RESULT yet (Status of: 2017-02-13) % % See also: SGbreakCorners, SGradialCorners, VLradialEdges % % SGB=SGbreakCorners(SG,[vi,k,sf]) % === INPUT PARAMETERS === % SG: Solid Geoemtry % vi: index list or vertex list of SG % k: new corner distance % sf: corner reduction factor; default is 1 [*k] % === OUTPUT RESULTS ====== % SGB: New solid with % |
SGmodelKeyhole(RA,RO,rw,LA,LO,HO,slot)- Creates a SG including a key and a keyhole |
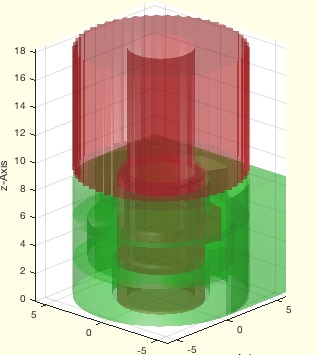 | % SGmodelKeyhole(RA,RO,rw,LA,LO,HO,slot) - Creates a SG including a key and a keyhole % (by Tim Lueth, VLFL-Lib, 2017-JAN-11 as class: MODELING PROCEDURES) % % SG modeling fnctn to create revolute joint that can be printed % assembled or separated and can be lined on an axis (Status of: % 2017-01-14) % % See also: SGmodelJoint, SGmodelLink, SGmodelNode % % [SGK,SGH,SGP,SGT,SGB]=SGmodelKeyhole([RA,RO,rw,LA,LO,HO,slot]) % === INPUT PARAMETERS === % RA: Axle Radius % RO: Outer Radius % rw: limiting turning angle; default is 2*pi % LA: [L1 L2 L3] describing key length % LO: [L1 L2 L3] describing key hole length % HO: Width of a flange in distance RO; default is 2*RO % slot: default is 0.3 mm (SLS & SLA) % === OUTPUT RESULTS ====== % SGK: Solid Geoemtry of Key % SGH: Solid Geoemtry of Keyhole % SGP: Solid Geometry of flange plate % SGT: Optional Knob on the upper side; separated from SGK % SGB: Optional Knob on the lower side; separated from SGK % % EXAMPLE: Print job was successful on Form2 SLA-Printer on 2017-01-12: % SGmodelKeyhole(3,6,'',9) % [A,B,C,D]=SGmodelKeyhole(3,6,'',9); % SGanalyzeGroupParts({A,B,C,D}) % % |
SGmodelLink3(L,lb,lf)- retuns solid geometries for R linkages |
 | % SGmodelLink3(L,lb,lf) - retuns solid geometries for R linkages % (by Tim Lueth, VLFL-Lib, 2017-JAN-11 as class: MODELING PROCEDURES) % % See also: SGmodelLink, SGmodelLink1, SGmodelLink2 % % SGA=SGmodelLink3(L,lb,lf) % === INPUT PARAMETERS === % L: % lb: % lf: % === OUTPUT RESULTS ====== % SGA: % |
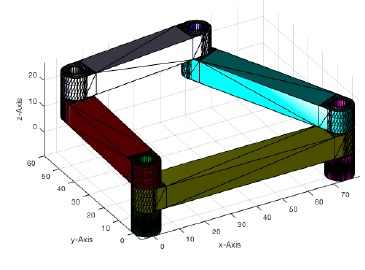
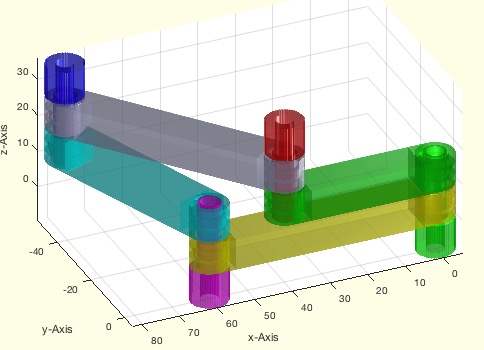
exp_2017_01_11- EXPERIMENT to create linkages using SGmodelLink2 |
 | % exp_2017_01_11 - EXPERIMENT to create linkages using SGmodelLink2 % (by Tim Lueth, VLFL-Lib, 2017-JAN-11 as class: EXPERIMENTS) % % See also: exp_2017_01_14, SGmodelKeyhole, exp_2016_12_31, exp_2016_12_27 % % exp_2017_01_11 % |
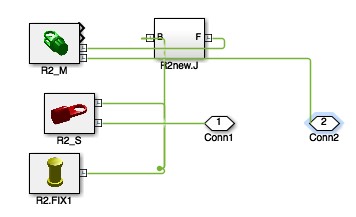
smbshow(block)- shows the system/subsystem diagram of the current block |
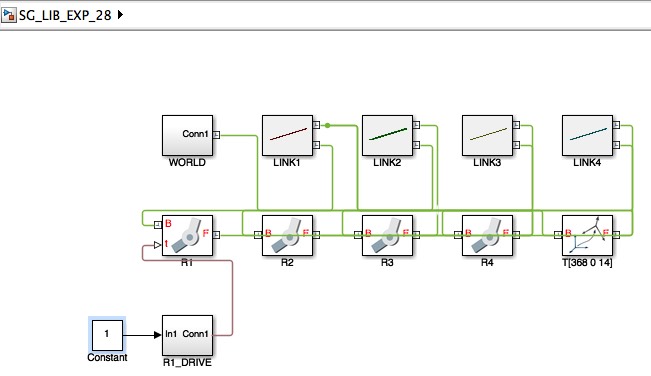 | % smbshow(block) - shows the system/subsystem diagram of the current block % (by Tim Lueth, SimMechanics, 2017-JAN-08) % % See also: smbGetSubSystempath % % smbshow([block]) % === INPUT PARAMETERS === % block: block handle';default is gcb % |
imageFigureMovie(figh,FName)- Creates a cell list of frames to write a movie later |
 | % imageFigureMovie(figh,FName) - Creates a cell list of frames to write a movie later % (by Tim Lueth, Video-Lib, 2017-JAN-06) % % Parameter is figure handle or: % 'start', 'record': resets the image counter % 'end'; returns the image cell list as movie % 'save'; writes the movie on disk % % To record an video start with: imageFigureMovie('record'); % To add an video image frame use: imageFigureMovie(gcf); % To save the movie use: imageFigureMovie('end','new_video.avi'); % (Status of: 2017-01-07) % % See also: imageFigureSaveMovie, imageVideoFrames, imageVideoTitle, % imageVideoTextPage, imageVideoEndtitle, imageVideoWrite, % videoCopyFrames, videoCopyCutMovies, videoWriteClipMovie % % movie=imageFigureMovie([figh,FName]) % === INPUT PARAMETERS === % figh: 'start', 'end', or gcf or figure handle % FName: Optinal filename for command 'save' % === OUTPUT RESULTS ====== % movie: [] or movie if figh=='end; % % EXAMPLE: % imageFigMovieRecord('start'); for i=1:10; imageFigMovieRecord; end; % I=imageFigMovieRecord('end') % |
exp_2017_01_06- EXPERIMENT to create a ring |
 | % exp_2017_01_06 - EXPERIMENT to create a ring % (by Tim Lueth, VLFL-Lib, 2017-JAN-06 as class: EXPERIMENTS) % % exp_2017_01_06 % |
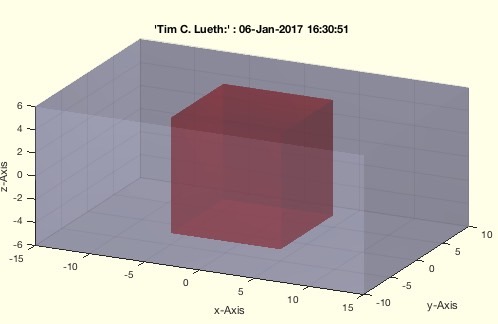
BBofSG(SG,sep,kin)- returns the bounding box of a solid geoemtry |
 | % BBofSG(SG,sep,kin) - returns the bounding box of a solid geoemtry % (by Tim Lueth, VLFL-Lib, 2017-JAN-05 as class: ANALYTICAL GEOMETRY) % % Creates the vertex list of all vertices of the solid geometry. The % calculates the bounding box. Supports nested SG. In case of kinematic % structures, only BBofSG can create turned bound boxes. (Status of: % 2018-08-20) % % Introduced first in SolidGeometry 3.3 % % See also: BBiscollofVL, BBofVL, CPLofBB, SGofBB, VLFLofBB, % outboundingbox % % [BB,SGBB]=BBofSG(SG,[sep,kin]) % === INPUT PARAMETERS === % SG: Solid Geoemtry % sep: separation of cells; default is false % kin: Frame for optimized bounding boxes; default is 'B' % === OUTPUT RESULTS ====== % BB: Bounding Box % SGBB: optional Solid Geometry of the bounding box % % EXAMPLE: % load JACO_robot % BBofSG(JACO) % BBofSG(JACO,true) % % See also: BBiscollofVL, BBofVL, CPLofBB, SGofBB, VLFLofBB, % outboundingbox % % % Copyright 2017-2019 Tim C. Lueth |
SGmagnifyVL(oSG,m,lim,prop)- magnifies/shrinks the dimensions of the vertex list |
 | % SGmagnifyVL(oSG,m,lim,prop) - magnifies/shrinks the dimensions of the vertex list % (by Tim Lueth, VLFL-Lib, 2017-JAN-05 as class: ANALYTICAL GEOMETRY) % % The factor for half the volume is m=.5^(1/3) % In contrast to SGgrow, this fnctn just multiplies the vertex list with % a constant factor. The factor is either fixed or calculated from a % limiting bounding box [limx limy limz]. In the second case, the scaling % can be proportional or to fill the limiting bounding box. (Status of: % 2020-08-09) % % Introduced first in SolidGeometry 3.3 % % See also: SGgrowoutsideFS, SGgrow, SGscale2dim, SGshrinktofit % % [SG,m]=SGmagnifyVL(oSG,m,[lim,prop]) % === INPUT PARAMETERS === % oSG: Original Solid Geoemtry % m: magnification value or [mx my mz] % lim: optional boundaries for magnification % prop: proportional scaling; default is true % === OUTPUT RESULTS ====== % SG: resulting Solid Geometry % m: used scaling factor [mx my mz] % % EXAMPLE: % A=SGbox([10 10 10]); % SGmagnifyVL(A,[3 2 1.5]) % % See also: SGgrowoutsideFS, SGgrow, SGscale2dim, SGshrinktofit % % % Copyright 2017-2020 Tim C. Lueth |
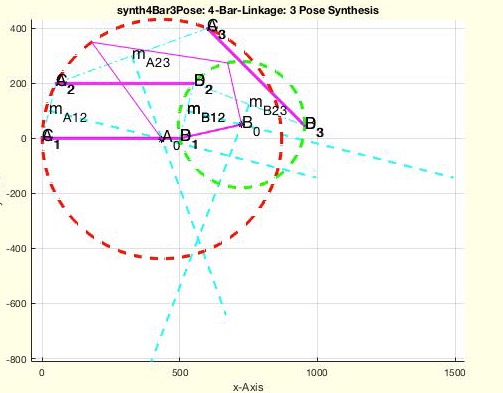
VLFL_EXP27- |
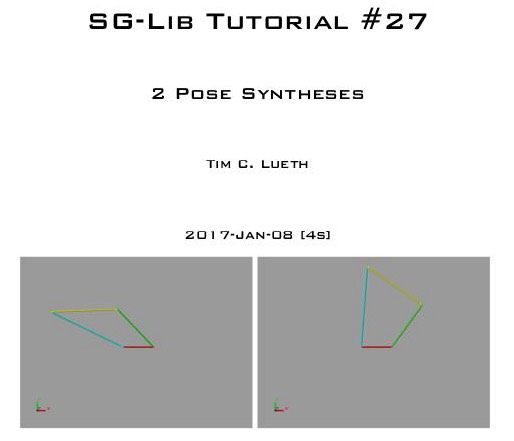 | %% PUBLISHABLE VLFL_EXP27 % (by Tim Lueth, VLFL-Lib, 2017-JAN-05) %% % VLFL_EXP27 - % (by Tim Lueth, VLFL-Lib, 2017-JAN-05) % % Poses are described by the start point and end point of a link. Der % erste Punkt der Koppel legt einen Punkt fest, der zweite Punkt auch die % Richtung. Im einfachsten Fall werden 2 Posen für den Entwurf eines % Viergelenks vorgegeben. Als Lösung gibt es dann zwei geraden auf denen % jeweils der Gestellpunkt A0 oder der Gestellpunkt B0 liegen darf. Der % Kreuzungspunkt dieser beiden Geraden ist der Polpunkt P12. Im % Sonderfall liegen beide Gestellpunkt an dieser Stelle und aus dem % Viergelenk wird ein Dreieck. In jedem Fall können die Gestellpunkte so % verschoben werden, so dass auch andere Nebenbedingungen erfüllt werden % können. (Status of: 2017-01-06) % % VLFL_EXP27 % |
smbNewLineRouting (asys)- smb reroutes the lines in the existing image |
 | % smbNewLineRouting (asys) - smb reroutes the lines in the existing image % (by Tim Lueth, SimMechanics, 2017-JAN-04) % % See also: smbAddLine, smbDeleteUnconnectedLines, PLroutefind % % smbNewLineRouting([asys]) % === INPUT PARAMETERS === % asys: system; default is gcs % |
PLroutefind(PL)- returns a right angle point list between start and end point |
 | % PLroutefind(PL) - returns a right angle point list between start and end point % (by Tim Lueth, VLFL-Lib, 2017-JAN-04 as class: AUXILIARY PROCEDURES) % % See also: smbNewLineRouting % % NPL=PLroutefind(PL) % === INPUT PARAMETERS === % PL: Original Point List % === OUTPUT RESULTS ====== % NPL: New Point List % |
