CPLgripperjaw
by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - CPL/Closed Polygon Lists
Introduced first in SolidGeometry 4.4, Creation date: 2019-01-16, Last change: 2025-09-14
creates a contour for a gripper design
Description
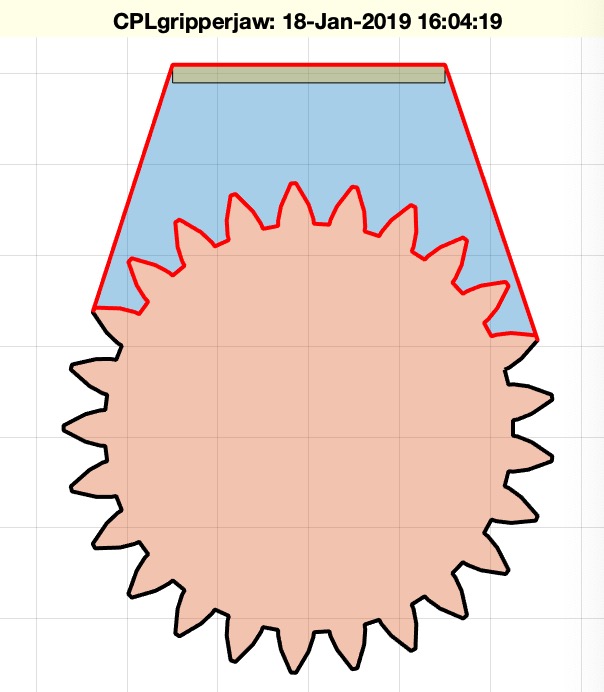
This function can be used to create a first design for a gripper jaw for a known contour. The first parameter is the contour to be gripped at the zero line Y=0; the second parameter is the relative position P0 of the TCP or the attachment point of the gripper to a kinematic system. The third parameter is the contour around the attachment points P0. The fourth parameter h0 describes how deep the gripper should plunge into the contour to be gripped under Y=0 line. Y=0-h0
The fifth parameter describes whether the gripper should only represent the convex hull of the object.
See Also: CPLfourbarlinkage
Example Illustration
Syntax
[CPLF,CPLF0]=CPLgripperjaw([CPL,P0,CPL0,hg])
Input Parameter
CPL: | | Object contour to be grasped (Orange) |
P0: | | Position of TCP |
CPL0: | | Contour around TCP (green) |
hg: | | depth of gripper jaw into the object |
Output Parameter
CPLF: | | Final Gripper Jaw Contour (red contour) |
CPLF0: | | Final Gripper Jaw Contour (red contour) with origin in P0 |
Examples
CPLgripperjaw(CPLsample(4)-[0 9],[0 5],PLsquare(30,2),5)
CPLgripperjaw(CPLsample(21)-[0 9],[0 30],PLsquare(30,2),0);
CPLgripperjaw(CPLsample(21)-[0 9],[0 30],PLsquare(30,2),0,true);
CPLgripperjaw(PLsquare(20,2)-[0,1],[0 10],PLcircle(4));
[a,b]=CPLgripperjaw; SGfigure; CPLplot(a,'r-');CPLplot(b,'-b')
Copyright 2019-2025 Tim C. Lueth. All rights reserved. The code is the property of Tim C. Lueth and may not be redistributed or modified without explicit written permission. This software may be used free of charge for academic research and teaching purposes only. Commercial use, redistribution, modification, or reverse engineering is strictly prohibited. Access to source code is restricted and granted only under specific agreements. For licensing inquiries or commercial use, please contact: Tim C. Lueth
Last html export of this page out of FM database by TL: 2025-09-21