by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - 4Bar/Linkages
Introduced first in SolidGeometry 4.4, Creation date: 2018-12-17, Last change: 2025-09-14
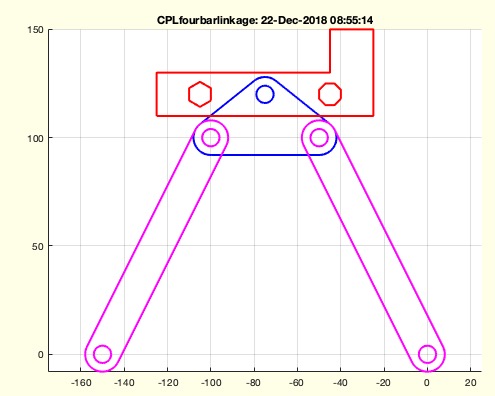
[CPL1,CPL2,CPLR,CPL,R12o,CPLX,TX,dt]=CPLfourbarlinkage([P1,P2,P3,P4,P5,R12,CPLX,dw])
P1: | Position of Crank Center | |
P2: | Position of TCP (end of coupler) | |
P3: | Position of link 1 (start of coupler) | |
P4: | Position of Base of link 1 (2R robot base) | |
P5: | Position of POI (0=P3 1= P2) or [POI delta x] | |
R12: | Ro and Ri Outer and inner Radius | |
CPLX: | Contour of the Shape linked to POI | |
dw: | optional turing angle |
CPL1: | CPL of swing, 2R-robot link 1 | |
CPL2: | CPL of coupler, 2R-robot link 2 | |
CPLR: | CPL of crank, radial position specification | |
CPL: | complete contour for sweeping | |
R12o: | [Ro and Ri] Outer and inner Radius | |
CPLX: | CPL of Final Contour | |
TX: | Final transformation matrix |
CPLfourbarlinkage;
CPLfourbarlinkage('','','','',0.5);
CPLfourbarlinkage('','','','',-3);
CPLfourbarlinkage('','','','',[0.5 20]);
CPLfourbarlinkage('','','','',[0.5 20],'',CPLsample(34)*10);