invkinplan2
by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Mechanical function
Introduced first in SolidGeometry 4.2, Creation date: 2018-07-19, Last change: 2025-09-14
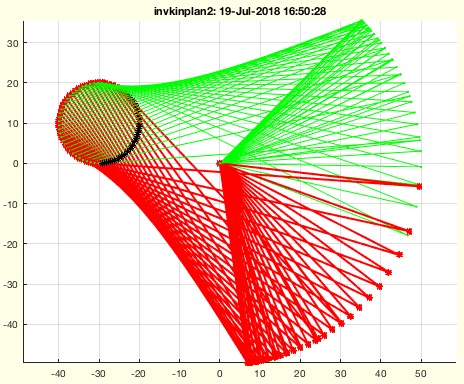
returns the inverse kinematic for a planr 2 arm robot
Description
This is just an example how to implement the results of exp_2018_07_19_invers_kin.mlx into a numeric function. It containts the closed analytical inverse kinematic for 2 swinging arms. This function can be used to simulate the movement of fourbar linkages (wrt. Franz Irlinger)
Format for PL (3rd Parameter):
[] => Cartesian Grid of 100 Points
n => Cartesian Grid of n x n Points
[x y] => Single Point
[r x y] => Radius and location of a crank (60 samples)
[r x y n] => Radius and location of a crank (n samples)
[r x y n s] => Radius and location of a crank (n samples) and angle segment in degree
[r x y n s w] => Radius and location of a crank (n samples) and segment and start in degree
See Also: realfourbarsolutions
, checkfourbarsegment
, miofPLA0B0
, shiftindexofinvkinplan2
, wofcross2circ
, invkinrplan3
, plot4Bar
Example Illustration
Syntax
[W,U,B1,B2,rs,PL,ss]=invkinplan2(l1,l2,[PL])
Input Parameter
l1: | | length first link |
l2: | | length second link |
PL: | | Point list (n x 2) or [r dx dy] or [r dx dy n] or |
Output Parameter
W: | | Angle Pair [n x 2] for solution 1 |
U: | | Angle Pair [n x 2] for solution 2 |
B1: | | Endpoint of Arm 1 for solution 1 |
B2: | | Endpoint of Arm 1 for solution 2 |
rs: | | real solutions index; true ~ solution exist |
PL: | | used Point list in case that PL was empty or a triple for a circle |
ss: | | Singularity Index rs&ss |
Examples
invkinplan2(25,20,[20 20; 25 25;27 27])
w=0:0.3:2*pi; w=w'; PL=30*[cos(w) sin(w)];
invkinplan2(20,11,PL)
w=0:0.3:2*pi; w=w'; PL=10*[cos(w) sin(w)]+[-30 +5];
invkinplan2(30,20,PL)
w=0:0.1:2*pi; w=w'; PL=10*[cos(w) sin(w)]+[-30 10]; invkinplan2(50,80,PL);
invkinplan2(50,80); % Check work space
invkinplan2(50,80,[10 -40 10]); % Check a fourbar linkage
Copyright 2018-2025 Tim C. Lueth. All rights reserved. The code is the property of Tim C. Lueth and may not be redistributed or modified without explicit written permission. This software may be used free of charge for academic research and teaching purposes only. Commercial use, redistribution, modification, or reverse engineering is strictly prohibited. Access to source code is restricted and granted only under specific agreements. For licensing inquiries or commercial use, please contact: Tim C. Lueth
Last html export of this page out of FM database by TL: 2025-09-21