A1ofA1B1GPLPose | returns the list of the crank attachment points for poses |  |
calc4BarAngle | returns 4-Bar-Linkage points for link B | 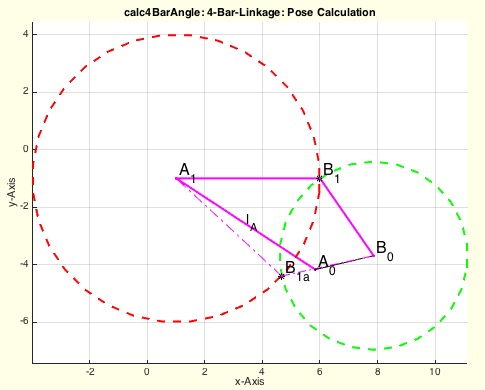 |
center3Pose | return center points for 3 poses (position and orientation) | 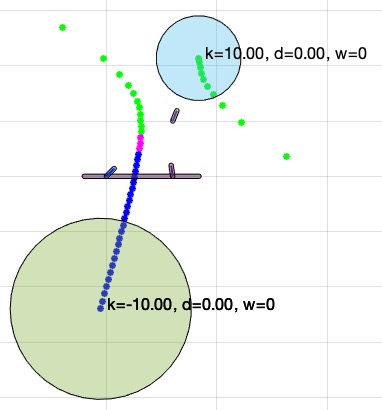 |
center3Poseeffektorgrid | returns the rotations centers for grid points of the effector contour | 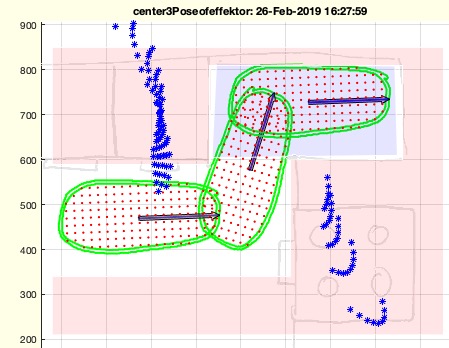 |
center4Pose | return center points for 3 poses (position and orientation) |  |
checkfourbar123solutions | just checks an limits solutions of 1-2-3 Pose syntheses | 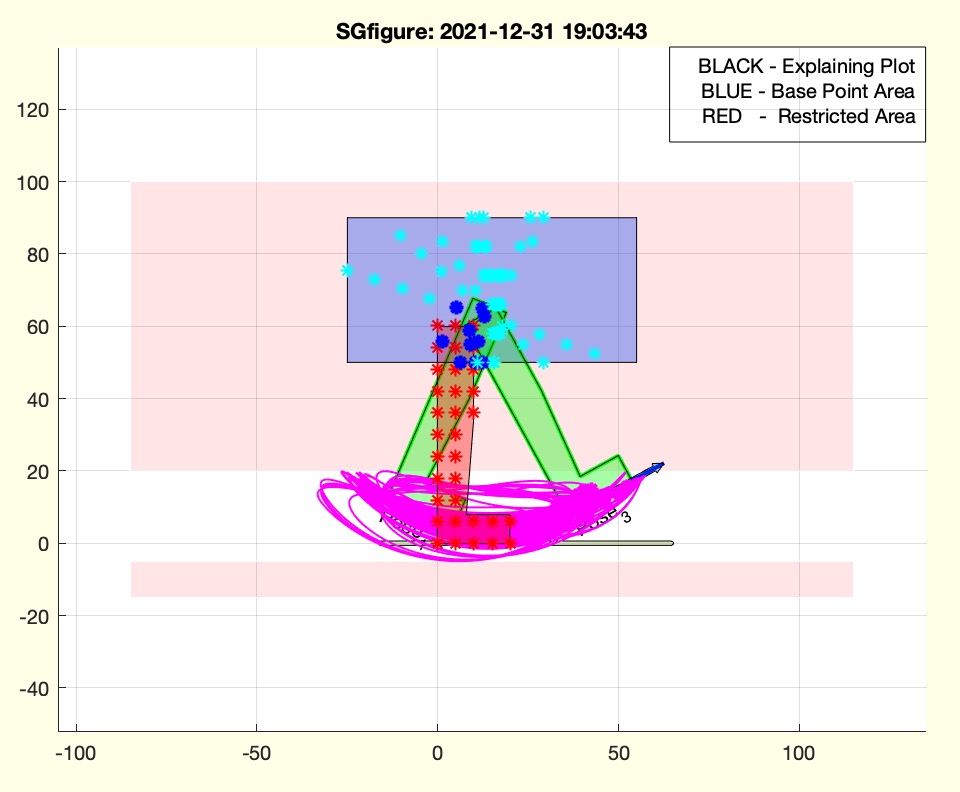 |
checkfourbar1Poseattachpermutation | Performs a fourbar-linkage syntheses based on ONE defined Pose | 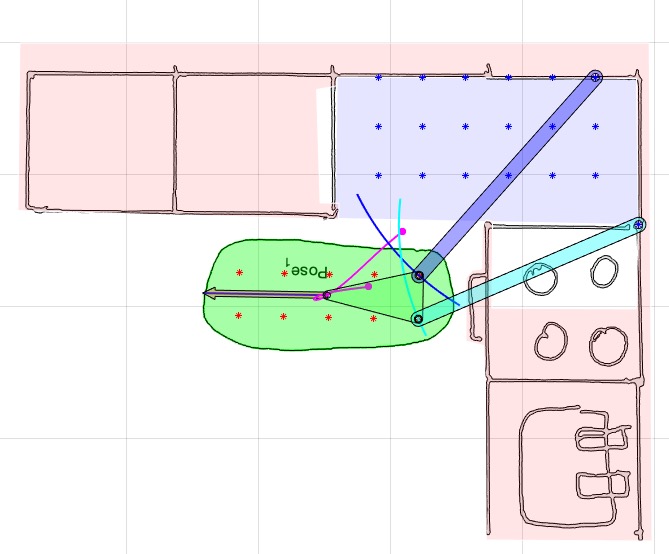 |
checkfourbar2Poseattachpermutation | Returns solutions for the 2 Pose Sythesis | 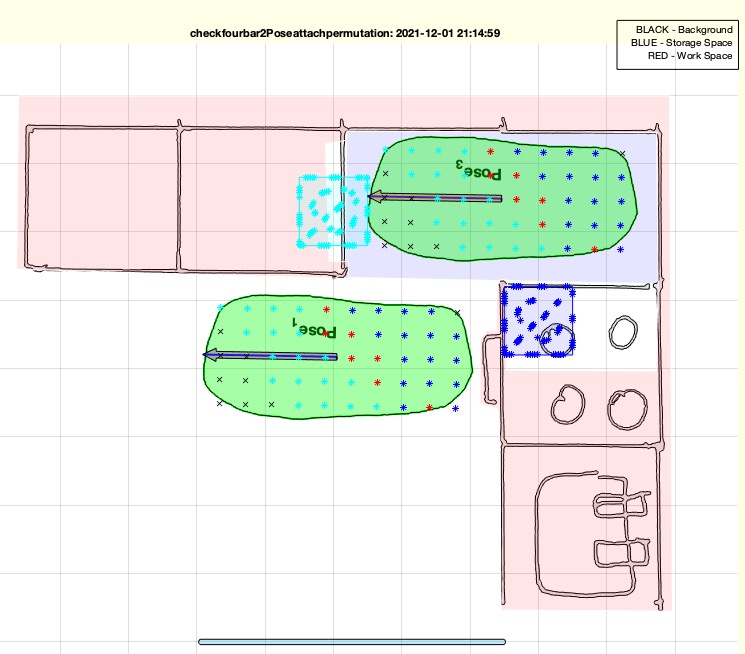 |
checkfourbar3Pose | checks whether a fourbar joint solution exists for results of center3Pose | 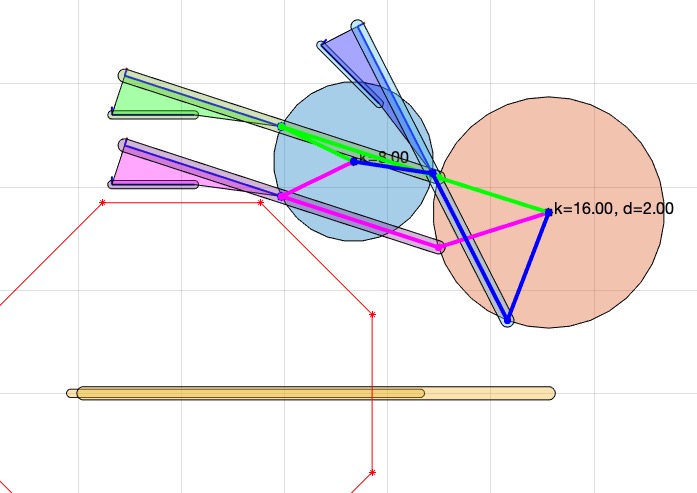 |
checkfourbar3Poseattachpermutation | returns only subset of permutations of grid points to achieve a real fourbar linkage solution | 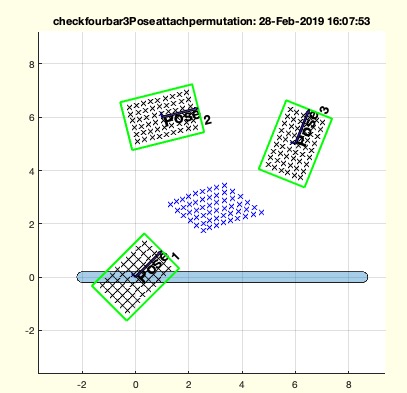 |
checkfourbar3Posepermutation | calculates from a center3pose solution all possible permutations and the fourbar parameters |  |
checkfourbarcouplerlength | checks the solutions of invkinplan2 for a fourbar linkage calculation | 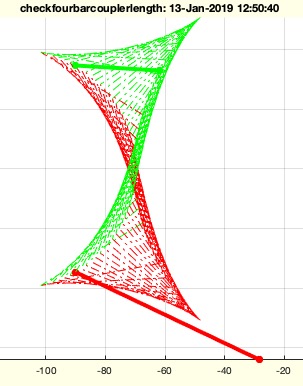 |
checkfourbarNPose | checks whether a fourbar joint solution exists for results of center3Pose |  |
checkfourbarsegment | calculates the angle intervals for a fourbar linkage and appoint point to the intervall | 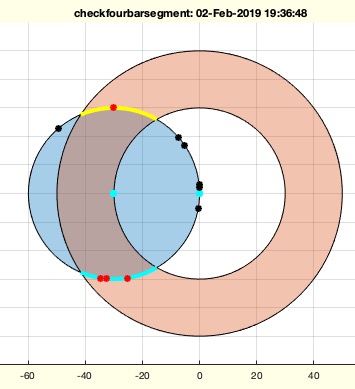 |
colofPose | returs colors from Pose and 4Bar standard colors |  |
CPLfourbarblockswing | creates the contour that limit the swing movement |  |
CPLfourbarcontour | Contour that fullfills a fourbar condition | 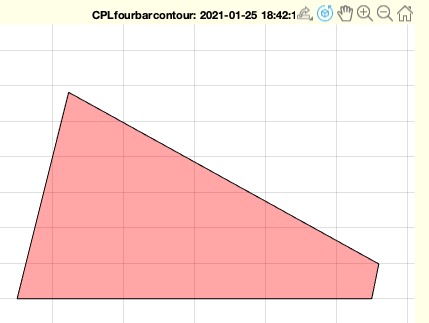 |
CPLfourbarlinkage | creates for a specified fourbar linkage the cpls for crank, coupler, swing | 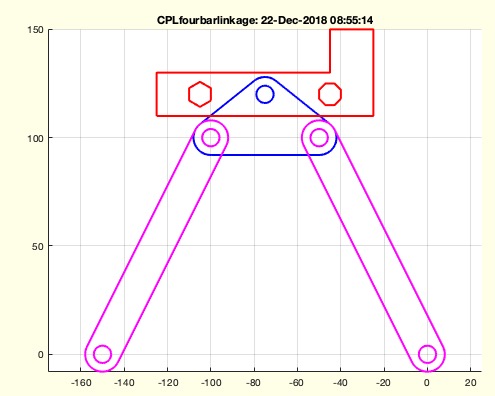 |
CPLfourbarlinkage2 | creates for a specified fourbar linkage the cpls for crank, coupler, swing | 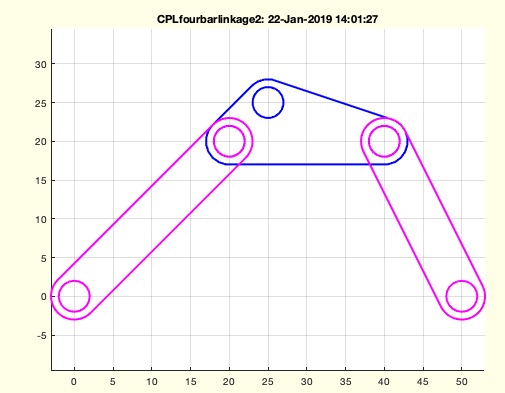 |
CPLfourbarlinkagehull | returns the hull shapes of crank, and swing | 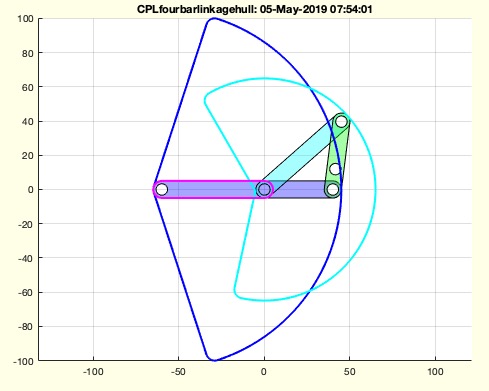 |
CPLofPosefourbarshape | returns the basic shapes of a pose fourbar linkage solution | 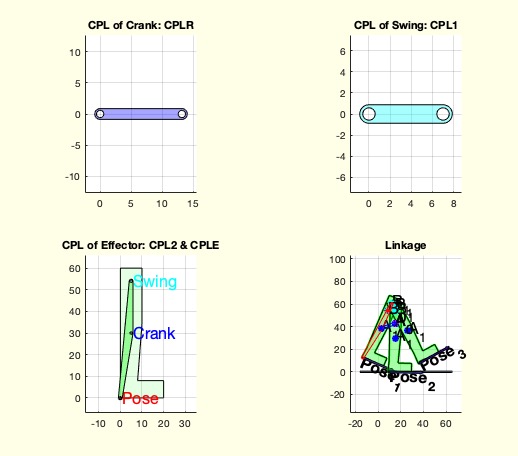 |
CPLofPosefourbarshaping | returns collision free path shaped contour for a specific fourbar linkage | 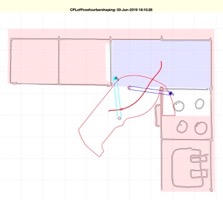 |
CPRofPosefourbar | returns center point list and radius list for a fourbar linkage for a given GPL and GAL | 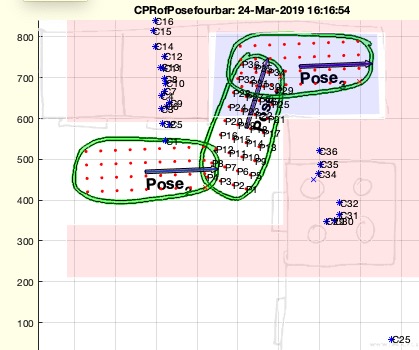 |
fourBarCLLL2SGdesign | Converts a contour layered link list into a real solid geometry construction to 3D print | 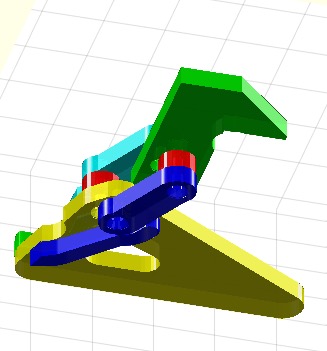 |
fourbarcollABGPL | returns the crank angle interval for an object liked to a Pose | 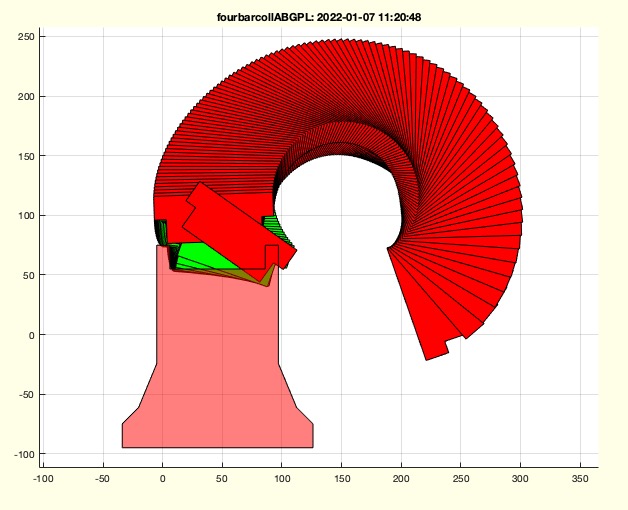 |
fourbardesignbysiri | generates 4bar-linkages from a dictation fnct of Siri on MAC | 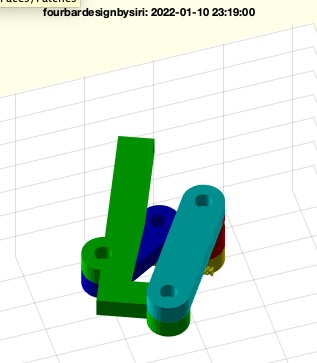 |
fourBarLinkage | multi purpose fnct for a 4-Bar-Linkage |  |
fourBarLinkageanimate | animates a fourbarlinkage based on 4 Points, a Frame, and a Contour | 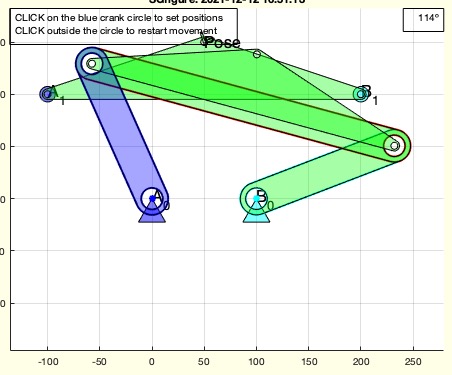 |
fourBarLinkageCPL | multi purpose fnct for a 4-Bar-Linkage |  |
fourBarLinkageplot | plots and animates the movement of a fourbar linkage | 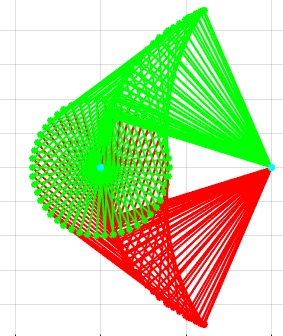 |
fourBarLinkageplotanim | plots and animates the movement of a fourbar linkage | 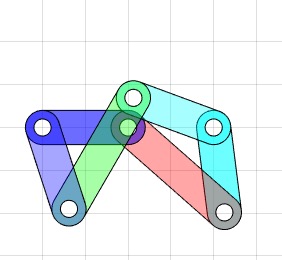 |
fourBarLinkageplotanimui | plots and animates the movement interactively of a fourbar linkage | 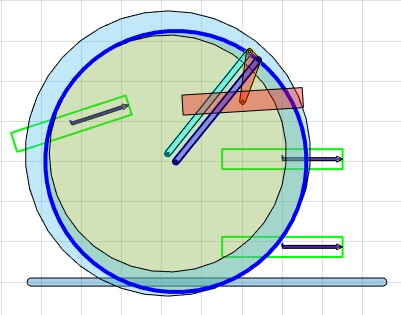 |
fourbarplotABGPL | simply plots a fourbar linkage based on points - recommended in SG-Lib 5.1 | 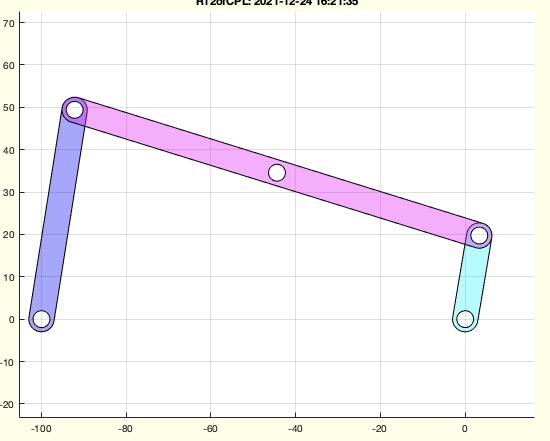 |
fourBarplotPoints | just plot a specific fourbar configuration based on points | 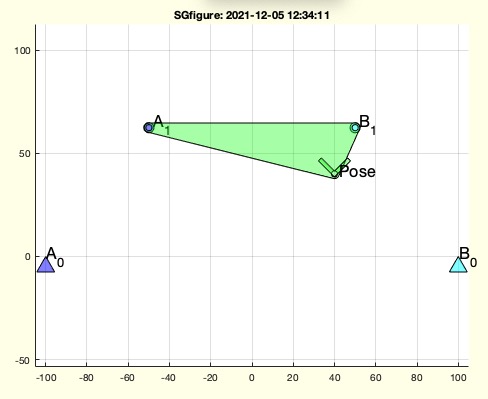 |
fourBarposeCPLmotion | returns the motion of all parts of a fourbar linkage | 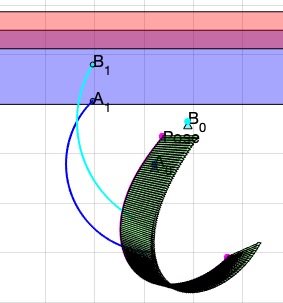 |
fourbarposeCPLshaping | returns collision free path shaped contour for a specific fourbar linkage | 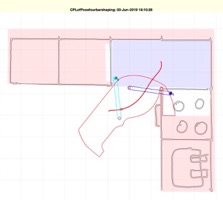 |
fourBarposelayering | Creates the layering and the shaping of all 8 elements of a Fourbar linkage | 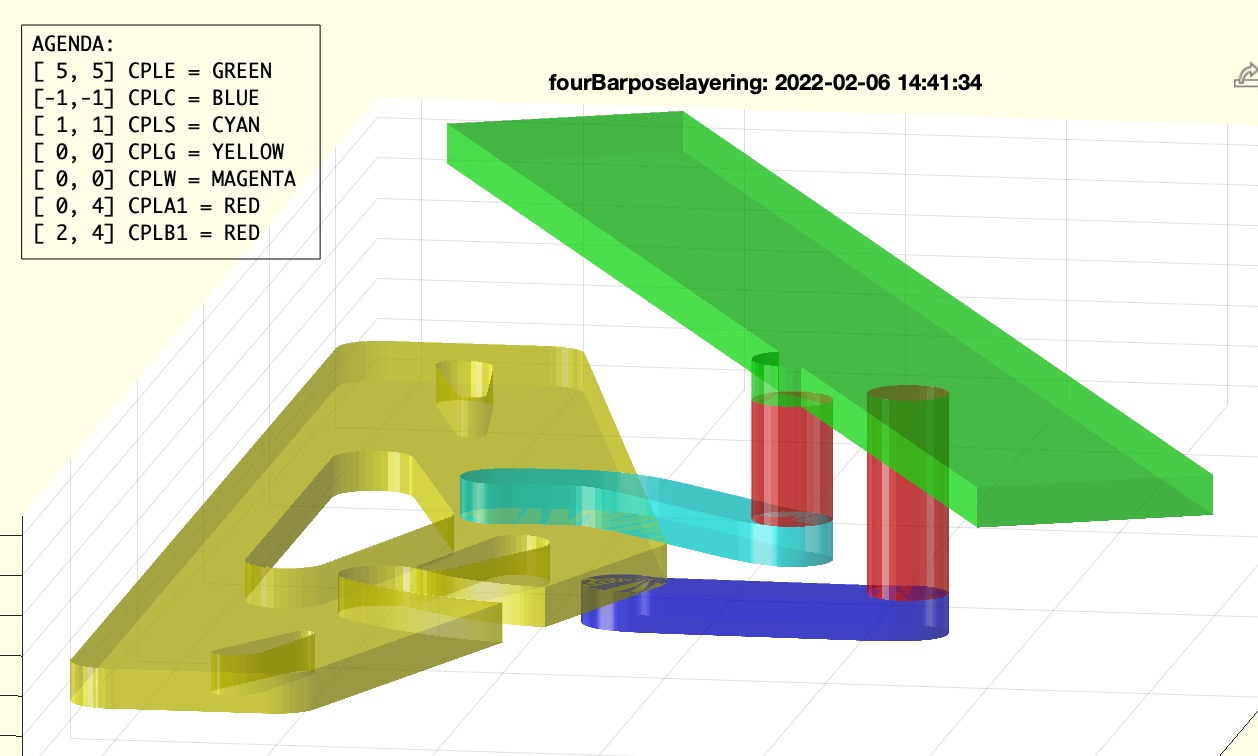 |
fourBarposeplotsolution | Standard procedure to animate fourBarposesyntheses results | 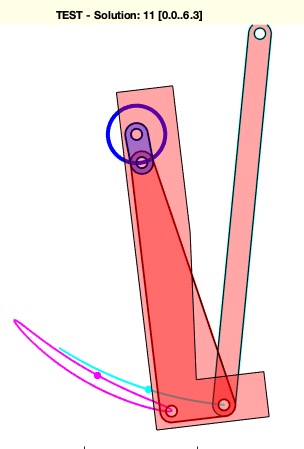 |
fourbarposesearchcouplercurve | sorts 4bar solutions wrt minimal distance of coupler path to a given set of points | 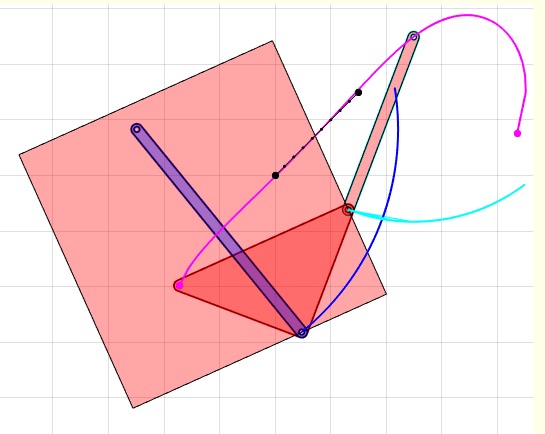 |
fourBarposesortsolution | sorts the solutions of the fourbar struct by some criteria and even selects | 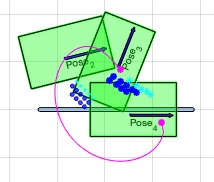 |
fourBarposesyntheses | fourbar pose synthesis |  |
getPoseconstraintvalue | returns wether a condition string is used within a Pose field | 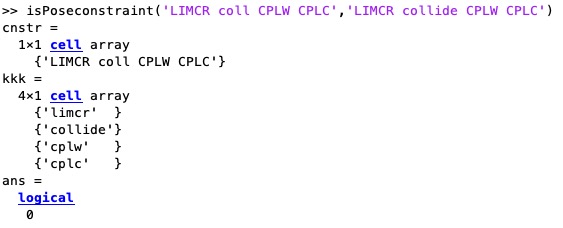 |
isPoseconstraint | returns wether a condition string is used within a Pose field | 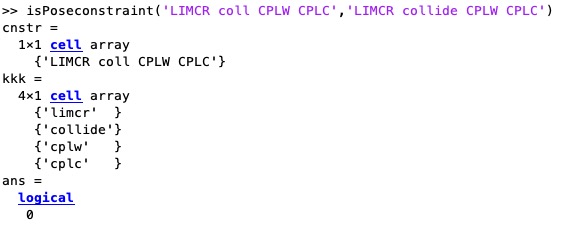 |
KDWofPoseattachments | returns the values for K, D, and W for given attachment points | 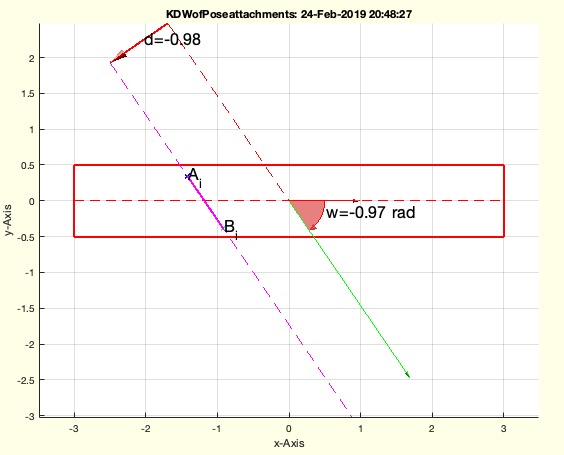 |
KDWPoseinsideCPL | creates a grid point list and the values for KDW | 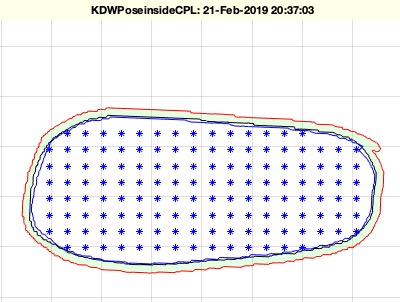 |
KDWPosevariation | returns three variant lists for center3Pose as a first recommendation | 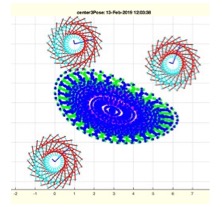 |
PLofFourbarcouplercurve | Creates the coupler courve for an Fourbar given by four points | 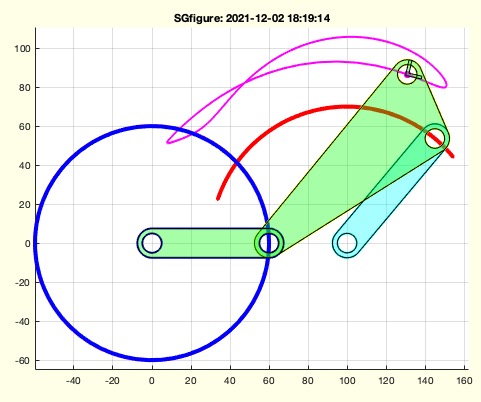 |
PLofPosecentrodes | returns fixed centrode (Rastpolbahn) and moving centrode (Gangpolbahn) of a fourbar linkage solution | 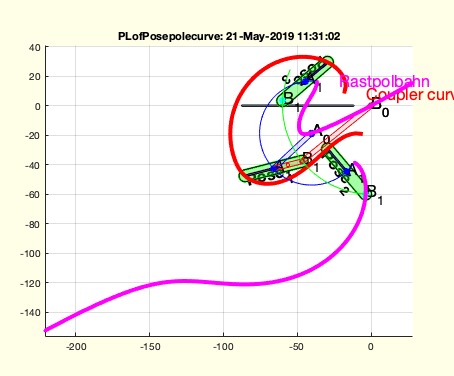 |
PLofPosecouplercurve | returns the path and the matrix list of the pose movement | 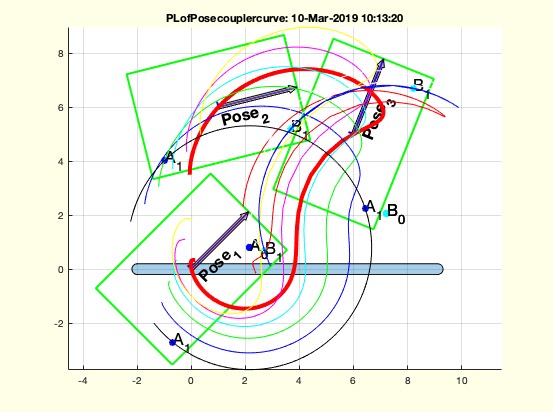 |
plot4Bar | plots a 4-Bar-linkage |  |
poletriangle3Pose | calculates the edges of the pole triangle of three poses | 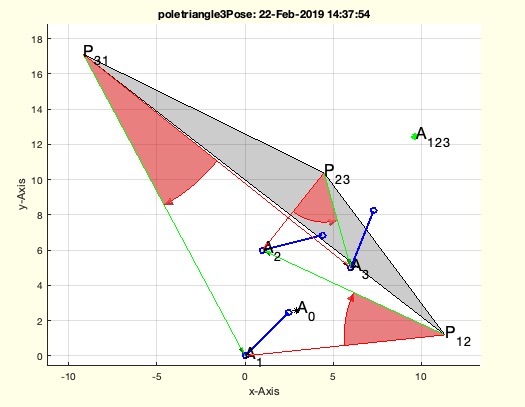 |
PoseaddGPL | creates a Grid inside/on a contour | 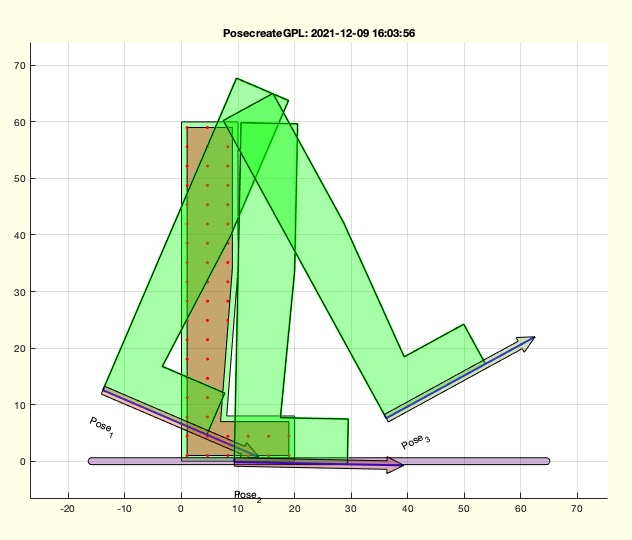 |
Poseflip | flips the direction of pose vectors in a Pose struct |  |
Posefourbaranglelimit | limits the angle are of a specific fourbar solution | 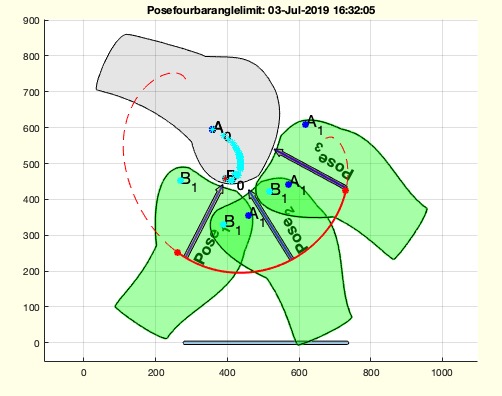 |
Posefourbarangles | Returns the angular position of the crank for the positions used in the four-bar linkage. | 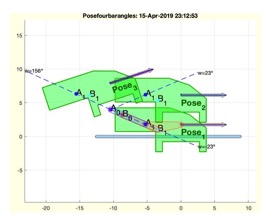 |
Posefourbaranimate | animates the fourbar linkage given Pose parameter | 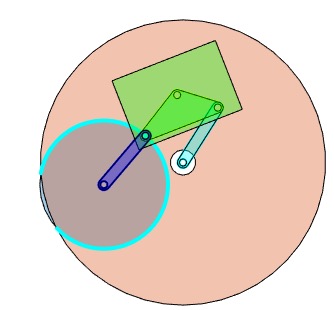 |
Posefourbarcheck | shows the shape of effector, crank and swing | 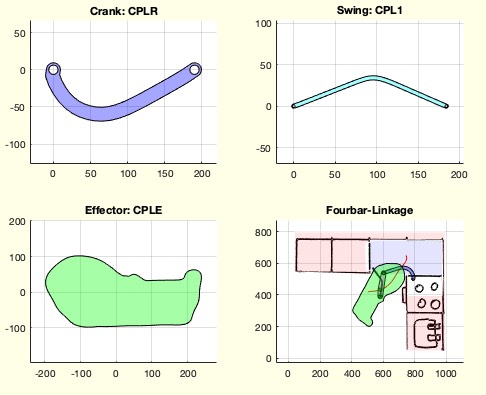 |
PosefourbarCPLE | creates a CPL for an Effektor containt 3 Points | 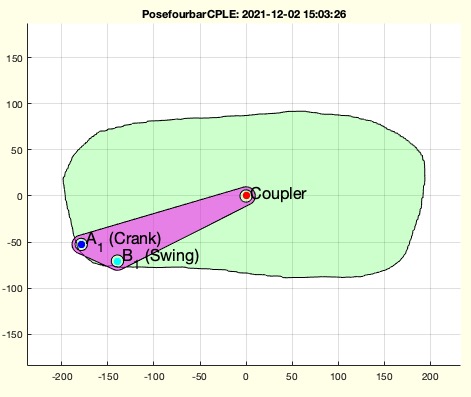 |
Posefourbarplotcouplercurve | simply plots a coupler curve for fourbar linkage | 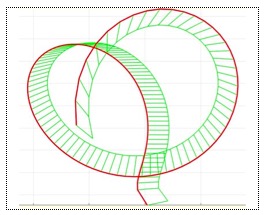 |
Posefourbarposelimit | finds the angle limits for a fourbar movement | 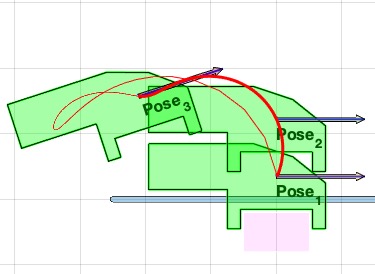 |
Posefourbarsearchcouplercurve | selects coupler courves based on the coupler curve | 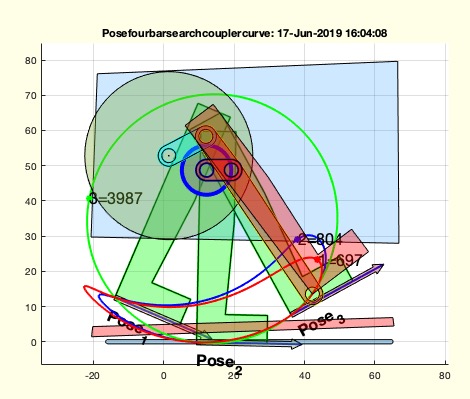 |
PosefourbarselectAP | simply select a solution from the Pose attachment point list | 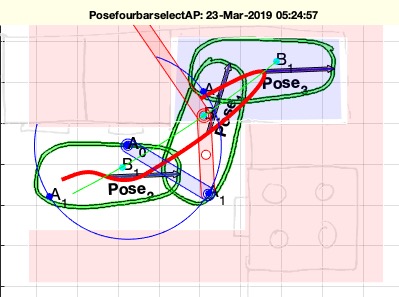 |
Posefourbarselectcouplercurve | selects coupler courves based on the coupler curve | 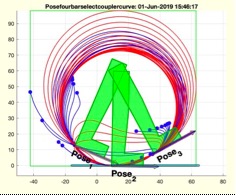 |
Posefourbarselectui | interactive tool to plot poses and to select two attachment/base points for a fourbar linkage |  |
Posefourbartorquetrans | returns the torque transmission factor for crank to swing and crank to pose | 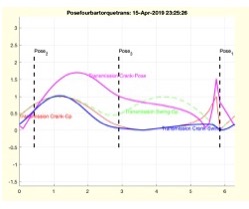 |
Posemagnify | scales the size of Pose struct dimensions | 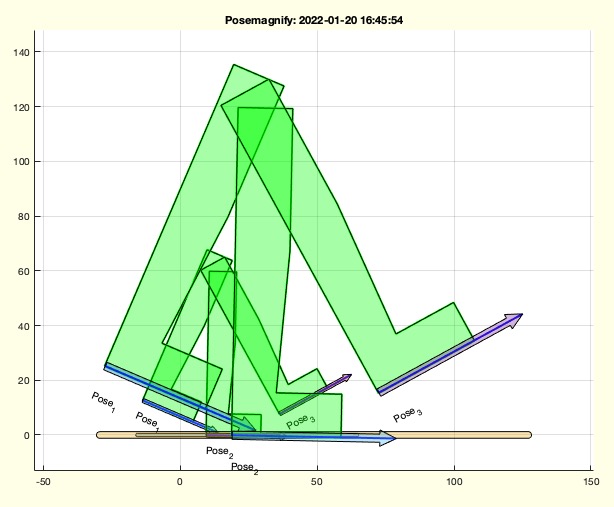 |
Posenorm | changes the length of pose vectors to a common length and shifts the start point | 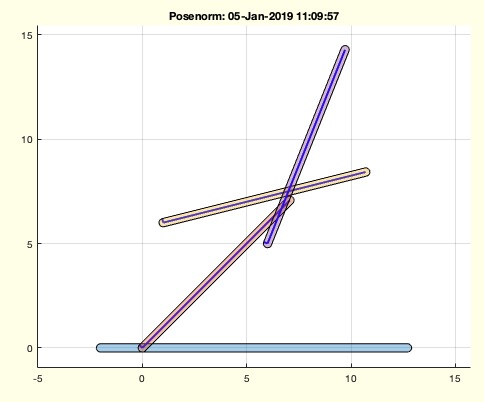 |
PoseofCPLcutui | allows the interactive shaping and move of poses of contours | 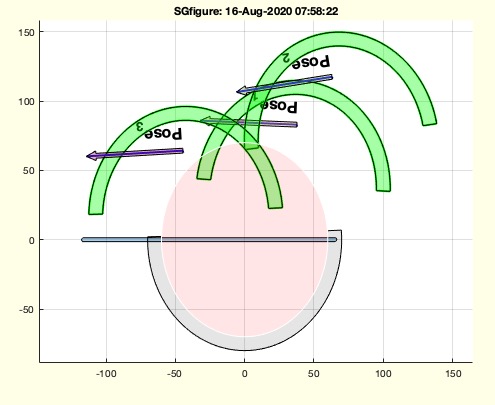 |
PoseofCPLui | allows the interactive move of poses of contours | 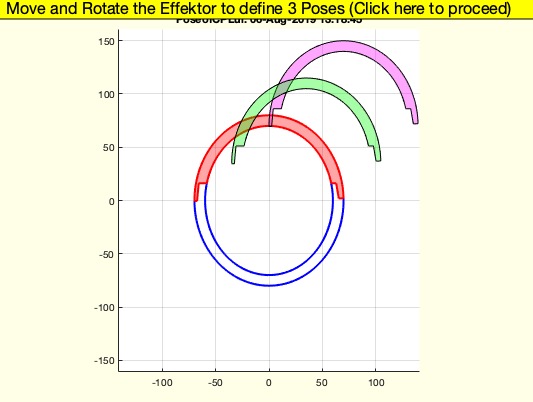 |
Poseoffourbarlinkage | creates a Pose struct with 3 or more poses for given fourbar linkgae parameters L1, L2, R, D/[A0;B0] | 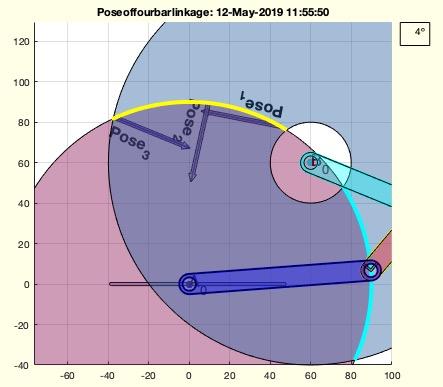 |
Poseofimageui | interactive fnct to defines three poses in a drawing image | 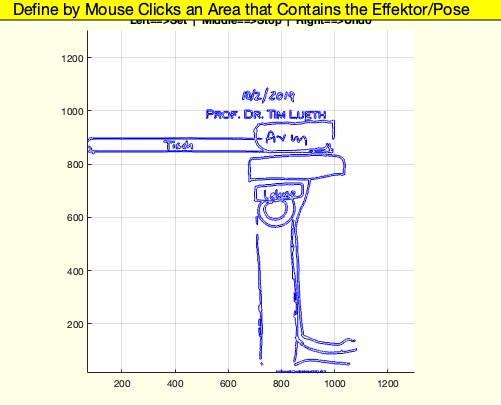 |
poseofPSanalyze | returns a Pose and a CPL from an analyzeed 3 Pose Polygon | 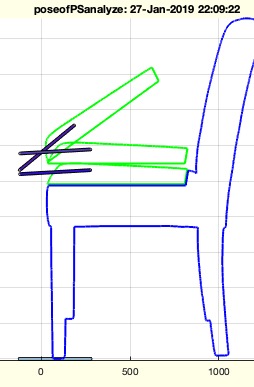 |
PoseofT | returns pose struct from a list of HT matrices either 3x3 or 4x4 | 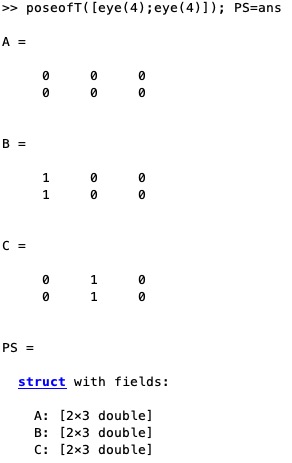 |
Poseorderchange | returs a pose struct with poses in changed order | 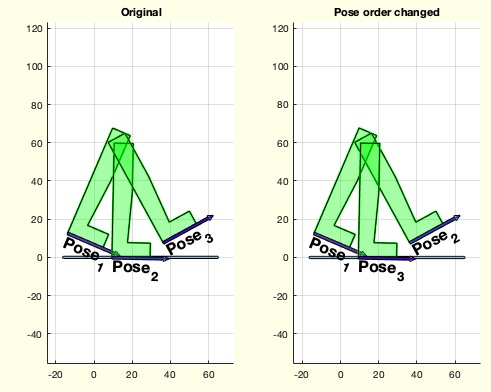 |
Poseplot | plots a pose struct | 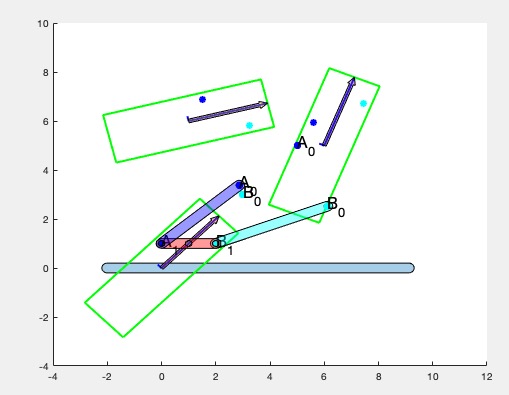 |
PoseplotA0B0 | plots the existing solutions for A0 and B0 | 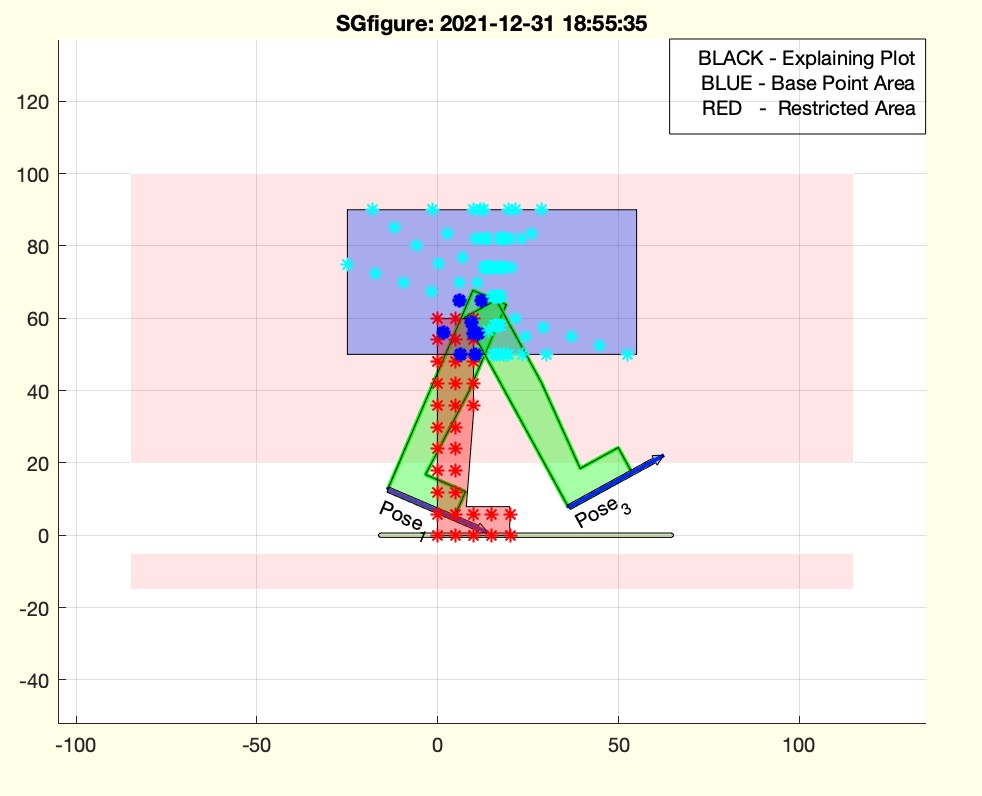 |
Poseplotsolution | plots A0, B0, and geometry and animation of fourbar linkage design | 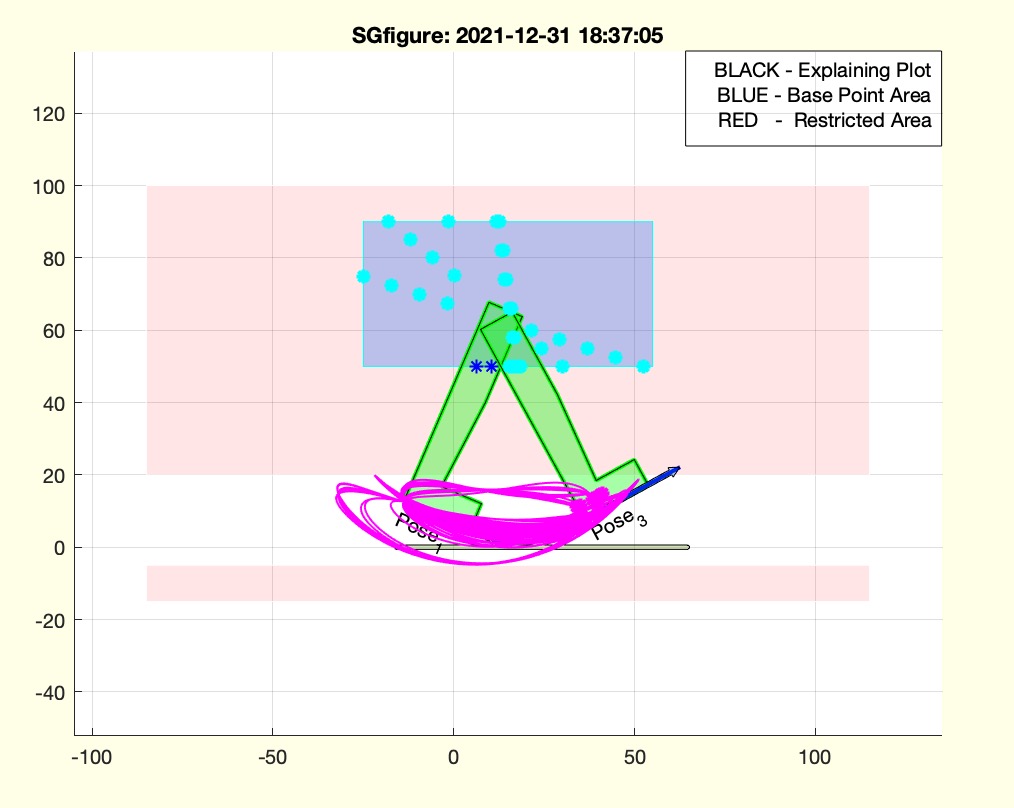 |
Poseplotspace | plot the different contours of a pose in different colors |  |
PosereadAPD | reads in a pose struct for syntheses tasks | 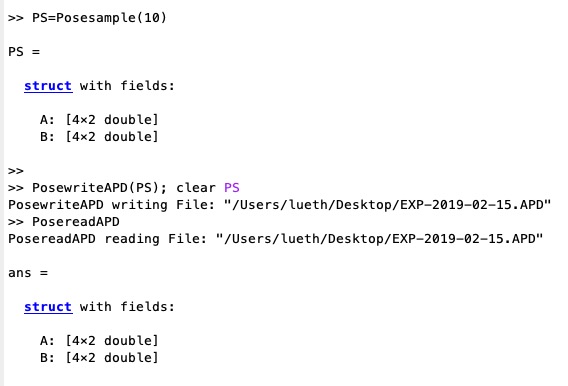 |
PosesampleCover | creates a pose struct sample for a box hinge lid | 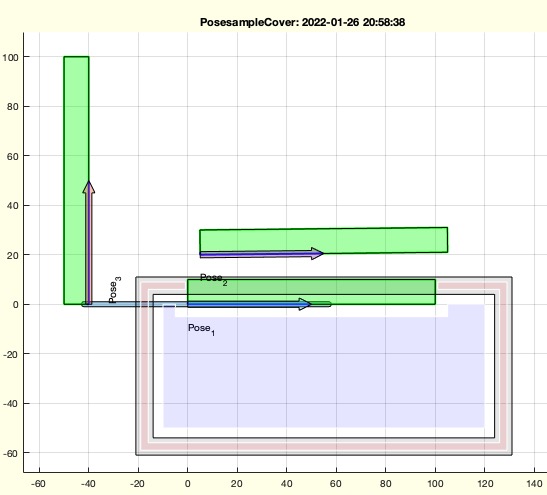 |
PosesampleCTFieldgenerator | creates a sample to design a turnable field generator fixture | 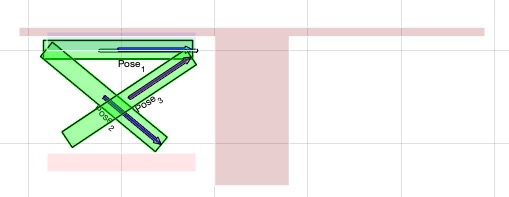 |
PosesampleHook | Pose sample for Hook Movement Task |  |
Posesampleupdate | inserts a pose struct and a name into the posesamles.mat file | 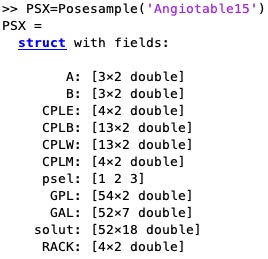 |
PosesampleWalk | pose sample will be integrated into Posesample | 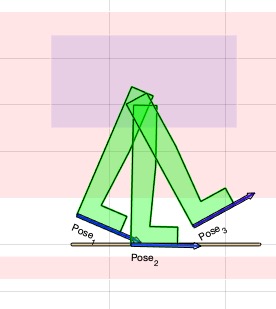 |
Posestripfields | removes alls fields that seem results not conditions from pose synthesis fncts | 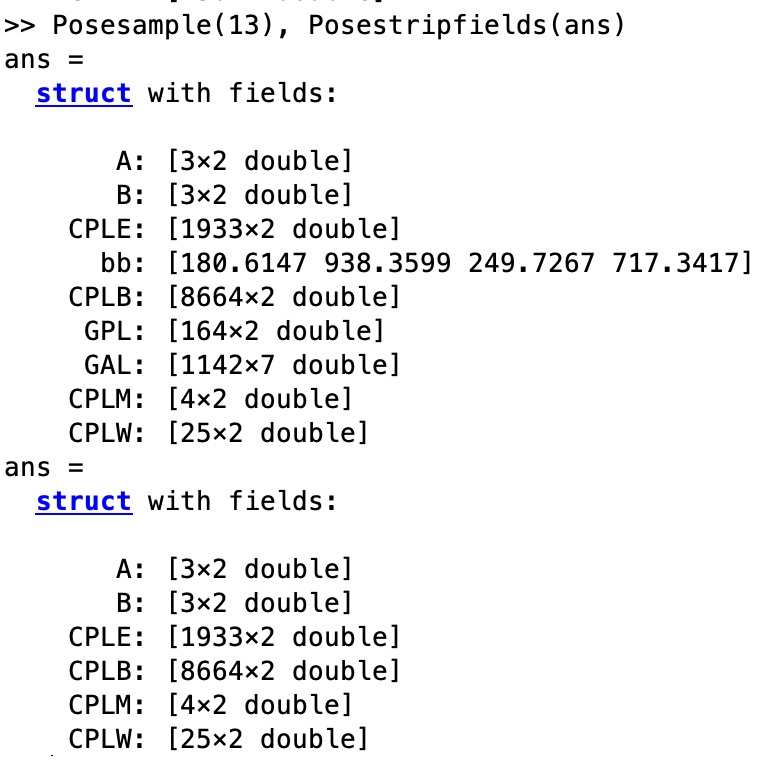 |
PosetransrelCPLE | shifts pose definition and CPLE using an HT transformation | 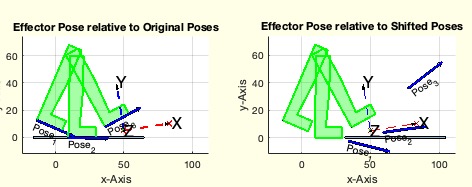 |
PosetransrelGPL | shifts the poses into an effector grid point | 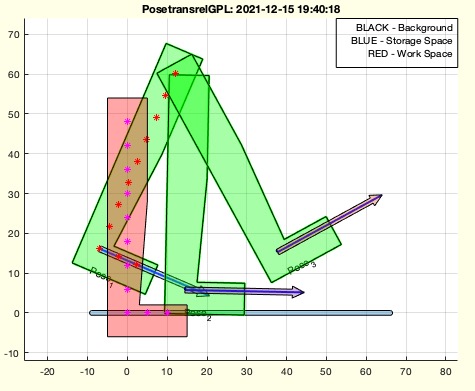 |
PosetransT | transform the pose vectors in a Pose struct | 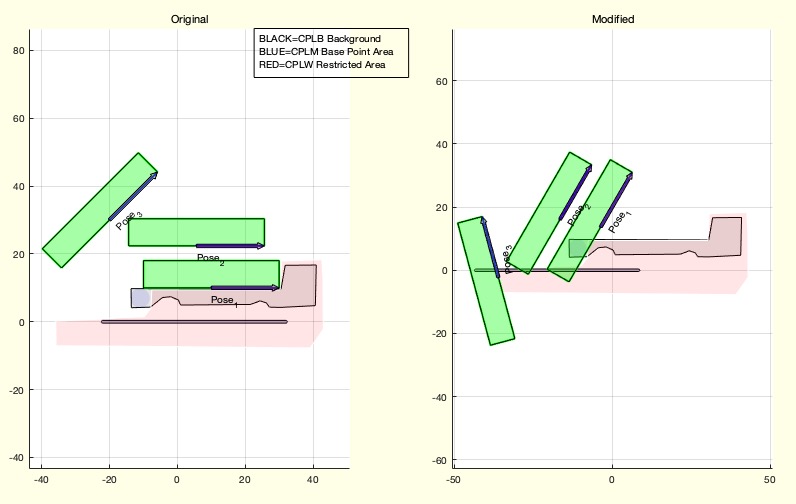 |
Posetransui | turns and moves interactively poses and recalculate fourbar linkage solutions | 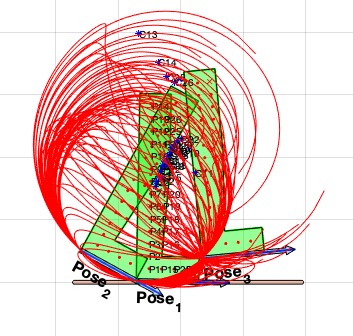 |
Poseui | returns a pose struct |  |
PosewriteAPD | writes a pose struct as ascii text file |  |
realfourbarsolutions | creates an index list to map fourbarlinkage solution points to movement types | 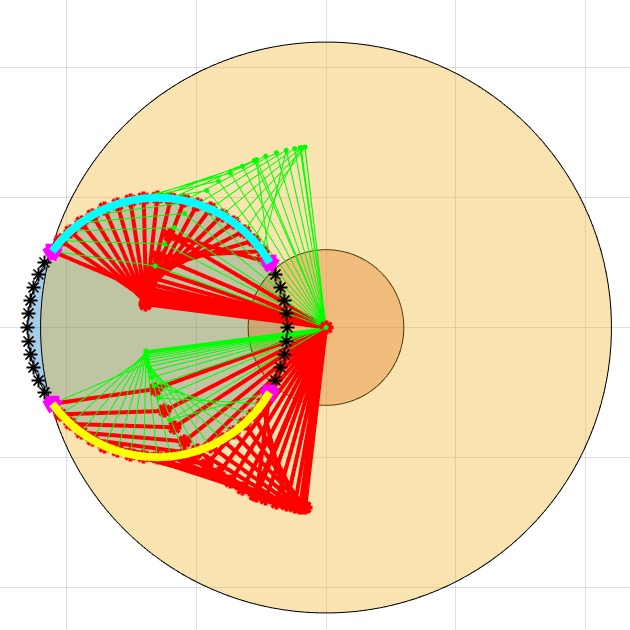 |
SGfourbarhullplate | returns the hull shapes of crank, and swing | 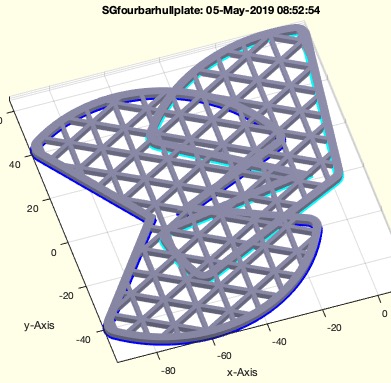 |
SGfourbarlinkage | creates solid geometry parts for a given linkage | 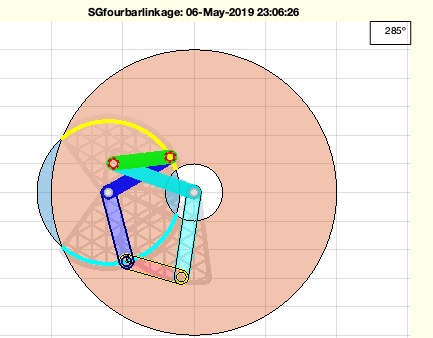 |
SGfourbarlinkage2021 | EXPERIMENT TO CREATE 4BAR LINKAGES FOR FRANZ IRLINGER | 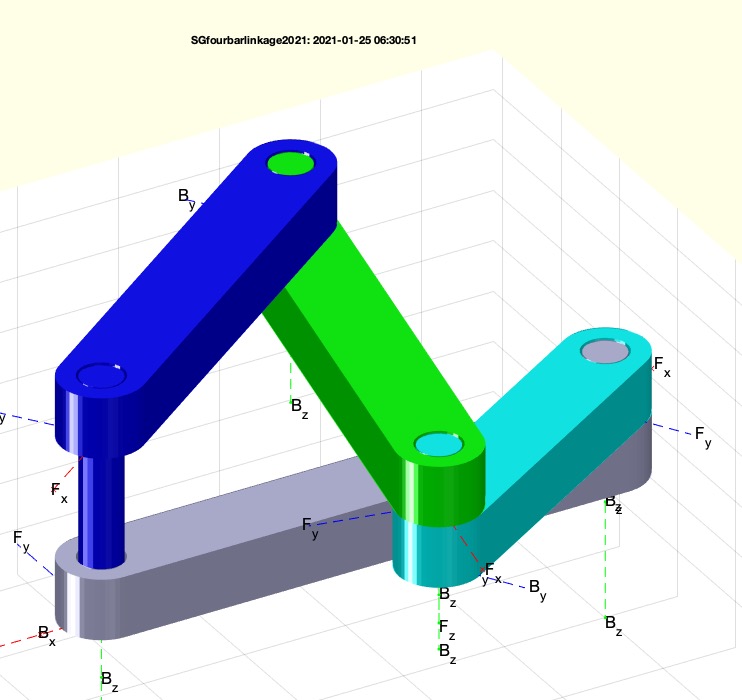 |
SGfourbarlinkageA0B0DIN912985 | Designs a 4bar-Linkage as solid geometry | 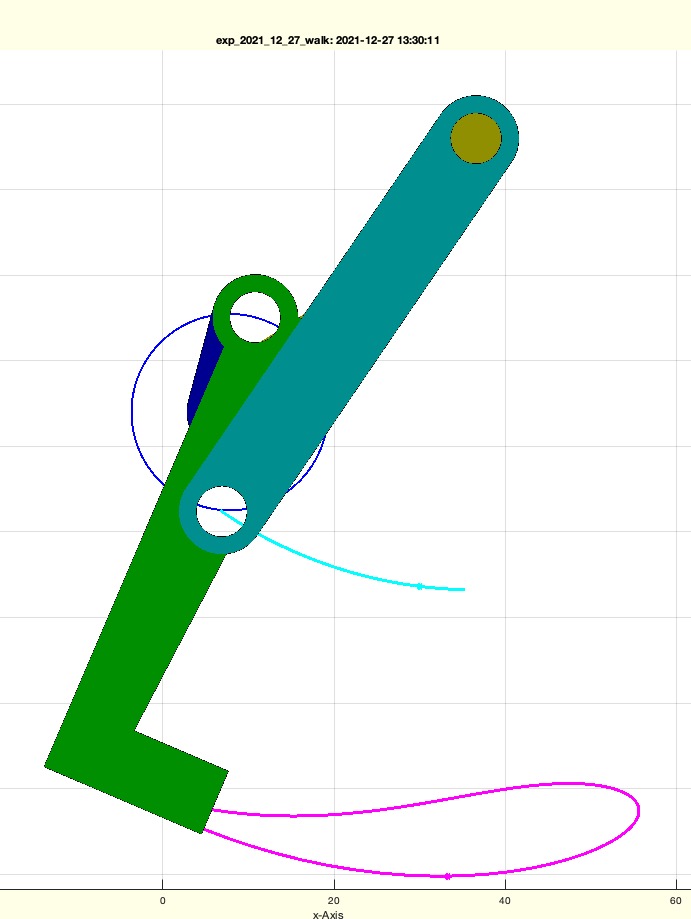 |
SGfourbarplate | returns a base plate for a fourbar linkage experiment | 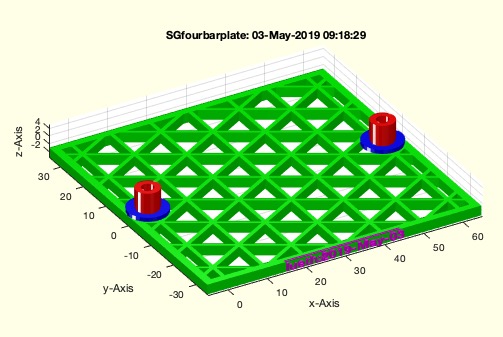 |
SGofPosefourbar | returns a fourbar linkage geometry for a given attachment point solution |  |
synth4Bar2Pose | returns 4 points for a 4 Bar linkage | 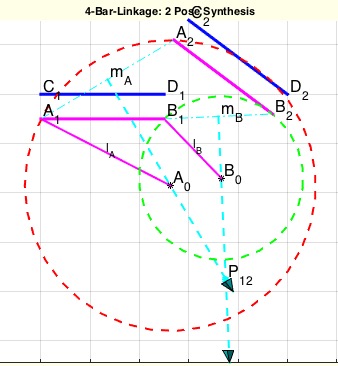 |
synth4Bar3Pose | returns 4 points for a 4 Bar linkage | 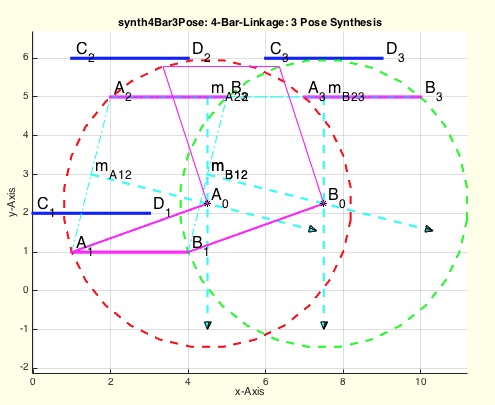 |
TofPose | returns 3x3 HT matrices for planar transformation in 2D from pose list | 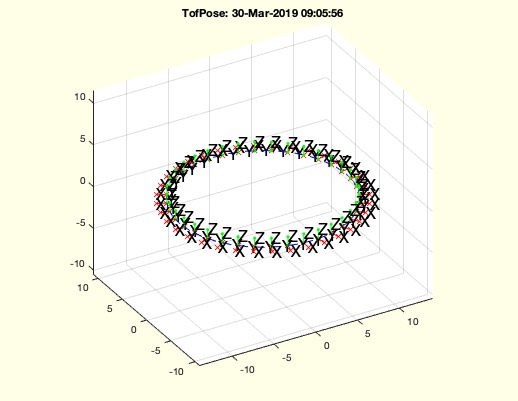 |
TofPoseattachmentpoints | returns the HT matrices from A1 to Pose and B1 to Pose | 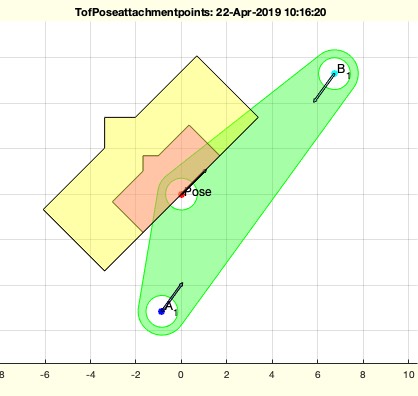 |
TofPoseGPL | returns the frames for A1 and B1 from a Pose and 2 GPL attachment points |  |