by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - 4Bar/Linkages
Introduced first in SolidGeometry 4.5, Creation date: 2019-04-22, Last change: 2025-09-14
Posefourbarcheck(PS,[aps,lim,CPLB,CPLE,CPLR,CPL1]);
PS: | Pose | |
aps: | solution to check | |
lim: | if true; limit the movement to the pose order | |
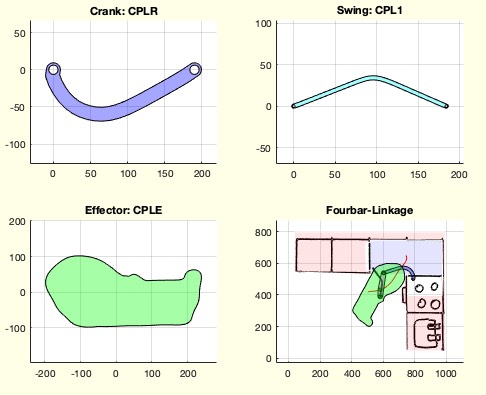
CPLB: | Optional Background Shape | |
CPLE: | Optional Effector Shape | |
CPLR: | Optional Crank Shape | |
CPL1: | Optional Swing Shape |
PS=PosereadAPD('basecabinet_new')
PosereadAPD('/Volumes/LUETH-WIN/MATLAB_files_for_experiments/basecabinet_new.APD'); PS=ans;
PS=checkfourbar3Poseattachpermutation(PS,'',20)
n=546
PS.CPLE=Posefourbarshaping(PS,[n,123],PLsquare(500,400),'E');
PS.CPLR=Posefourbarshaping(PS,[n,123],PLsquare(500,400),'C');
PS.CPL1=Posefourbarshaping(PS,[n,123],PLsquare(500,400),'S');
Posefourbarcheck(PS,n)