by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - 4Bar/Linkages
Introduced first in SolidGeometry 4.6, Creation date: 2019-05-26, Last change: 2025-09-14
See Also: SGfourbarlinkage
[SGM,SGA]=SGofPosefourbar(PS,[ap,lim,roi])
PS: | Pose struct including PS.GPL and PS.GAL | |
ap: | solution number of PS | |
lim: | optional limitation of pose order | |
roi: | [outer and inner radius and slot size [ro ri si] |
SGM: | Solid Geometries mounted | |
SGA: | Solid Geometries ready for printing |
clear PS
PS.CPLE=[ 0,0; 0,38; 0,60; 10,60; 10,34; 8,8; 20,8; 20,0];
PS.A=[ -13.888,12.554; 9.336,-0.147; 36.205,7.592; ]; % PS=Posetransui(PS)
PS.B=[ -12.968,12.160; 10.336,-0.167; 37.082,8.072; ];
SGfigure; Poseplot(PS);
PS=checkfourbar3Poseattachpermutation(PS,'',20); PS.GAL=PS.GAL(PS.GAL(:,6)==0,:);
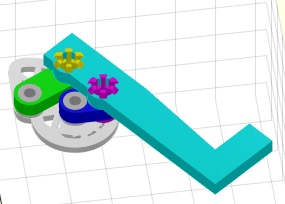
SG=SGofPosefourbar(PS,118);
SGfigure; SGplot(SG,'col');