by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - 4Bar/Linkages
Introduced first in SolidGeometry 5.2, Creation date: 2022-02-22, Last change: 2025-08-19
See Also: PosesampleHook
, VLFL_EXP69
PS=PosesampleHook
PS: | returns the Pose task for a hook |
See also usage example in VLFL_EXP69
PosesampleHook; PS=ans;
fourBarposesyntheses(PS,[1 2 3],16,[1 2 3],[1 3]); PS=ans;
fourBarposesyntheses(PS,[1 2 3],[16 3 3],[1 2 3],[1 3]); PS=ans;
fourBarposesortsolution(PS,'base-posy',[-inf -20],'ground-length','flip'); PSX=ans;
fourBarposelayering(PSX,1,[3 1.6 3],[0 1 -1 2],'wlim',[0 165]); CLLL=ans;
fourBarCLLL2SGdesign(CLLL,[3 1.6 3],'assembly','DIN7991');
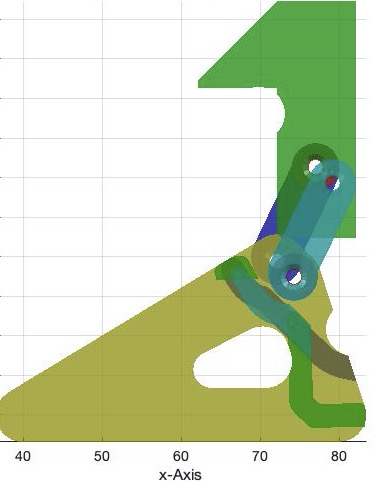
This function, PosesampleHook, is part of the SG-Library and is used for kinematics and frame analysis. It is a work in progress and not ready for final release. The function is designed to generate a pose sample for a hook task.
The function does not take any input parameters directly. It initializes several geometric shapes and transformations internally.
A with dimensions 120x20 using PLsquare.B with dimensions 60x100 using PLsquare.B relative to A using CPLtransrelCPL with parameters 'center', 'under', and 'add'. Adjust the position by adding [0 -10].D with dimensions 80x15 using PLsquare.D relative to CPLW using CPLtransrelCPL with parameters 'center' and 'alignbottom'.CPLE with dimensions 30x10 and additional parameters [10 1], '', and 0 using PLhook.PS.A with coordinates [60 0; 65 2; 80 -10] and add 0.1 to each element.PS.B as PS.A with an offset of [1 0].PS.RACK with coordinates [40 -40; 80 -40].CPLW, CPLM, and CPLE to PS.CPLW, PS.CPLM, and PS.CPLE respectively.SGfigure, plot the pose space with Poseplotspace, and plot the pose with Poseplot.The function returns a structure PS containing the pose sample data.