by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - 4Bar/Linkages
Introduced first in SolidGeometry 5.1, Creation date: 2021-12-16, Last change: 2025-08-18
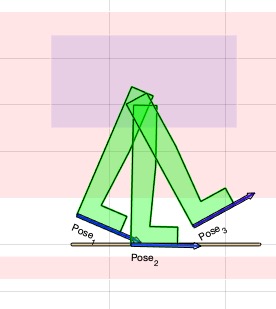
PS=PosesampleWalk
PS: | Posesample(12) |
PosesampleWalk; PS=ans;This algorithm is a MATLAB function named PosesampleWalk that integrates a pose sample into a Posesample object. It is part of the SolidGeometry library and is used for kinematics and frames.
The function does not take any input parameters directly. It operates on predefined values and functions within the script.
The function returns a structure PS, which is a Posesample object containing specific fields related to pose samples.
Posesample(12) to initialize or retrieve a Posesample object. The result is stored in the variable PS.PLsquare(80,40) and translate it by adding the vector [15 70]. This result is stored in CPLM.PLsquare(200,80) and PLsquare(200,10), translating them by [15 60] and [15 -10] respectively. Combine these with a nan nan separator to form CPLW.CPLM and CPLW to the corresponding fields in the PS structure.stripfields(PS,'A0L','B0L','GAL') to remove specified fields from the PS structure.SGfigure to create a new figure window.Poseplotspace(PS) and Poseplot(PS).CPLM and CPLW with specific colors, but these are not executed in the current script.Posesample: Initializes or retrieves a Posesample object.PLsquare: Creates a square with specified dimensions.stripfields: Removes specified fields from a structure.SGfigure: Opens a new figure window for plotting.Poseplotspace and Poseplot: Plot the pose space and pose respectively.