by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - 4Bar/Linkages
Introduced first in SolidGeometry 4.5, Creation date: 2019-04-22, Last change: 2025-09-14
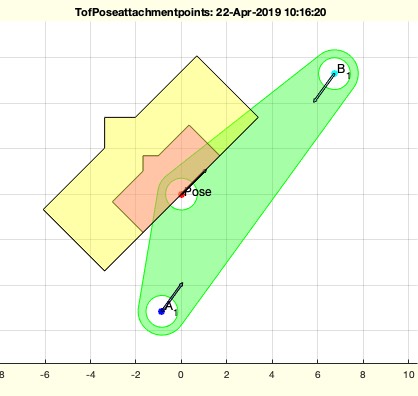
[TBP,TAP,TA1,TB1]=TofPoseattachmentpoints(P1,A1,B1)
P1: | Absolute Pose coordinates or complete pose consisting of PS.A, PS.B, PS.A1, PS.B1 | |
A1: | absolute coordinates of A1 when P1 is reached | |
B1: | absolute coordinates of B1 when P1 is reached |
TBP: | TAP=TA1\T0; to transform Pose origin coordinates into absolute Coordinate v TB1*TBP | |
TAP: | TBP=TB1\T0; to transform Pose origin coordinates into absolute Coordinate v TA1*TAP | |
TA1: | TA1=TofPose(A1,B1); % Simple frame in A1 with direction to B1 | |
TB1: | TB1=TofPose(B1,A1); % Simple frame in B1 with direction to A1 |
Posesample(7); PS=ans;
checkfourbar3Poseattachpermutation(PS,3,10); PS=ans;
PosefourbarselectAP(PS,1); PS=ans;
TofPoseattachmentpoints(PS); TAP=ans
[~,~,~,~,~,TA1,TB1]=PLofPosecouplercurve(PS,1); TA1=TA1(:,:,50), TB1=TB1(:,:,50)
cla; Posefourbarplot(PS,1)
PLofPosecouplercurve(PS)
CPLplot(PLtransT(PLarrow(5),TA1*TAP),'m-',2)
CPL=CPLlinkofPL([0 0;norm(TA1(1:2,3)-TB1(1:2,3))' 0;TAP(1:2,3)']); CPSplot(PLtrans(CPL,TA1),'m');