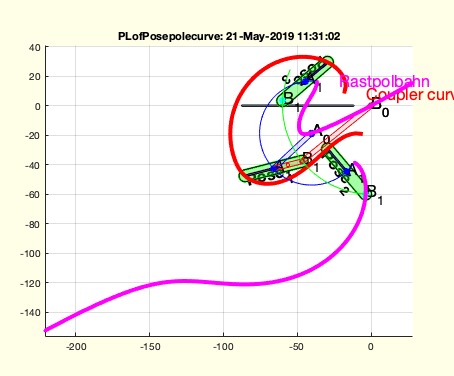
PLofPosecentrodes
by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - 4Bar/Linkages
Introduced first in SolidGeometry 4.6, Creation date: 2019-05-21, Last change: 2025-09-14
returns fixed centrode (Rastpolbahn) and moving centrode (Gangpolbahn) of a fourbar linkage solution
Description
Fixed Centrode (Rastpolbahn) and Moving Centrode (Gangpolbahn) describe two parts of a rolling joint and can be determined for each fourbar-linkage. The rolling joint can very well illustrate the movement of the fourbar-linkage.
See Also: PLofPosecouplercurve
, Posefourbarplotcouplercurve
, checkfourbar3Poseattachpermutation
Example Illustration
Syntax
[PLP,PL0,T0,wcr,TA0,TB0,TA1,TB1]=PLofPosecentrodes(PS,[aps,npnt,ncur])
Input Parameter
PS: | | Pose incl. GPL and GAL |
aps: | | index in GAL or [iA iB] for GAL |
npnt: | | number of points of the curve |
ncur: | | number of curves desired; default=0 (Pose Coupler Curve);(will be removed) |
Output Parameter
PLP: | | Point list of Coupler Points Movement |
PL0: | | Transformation matrix list of Coupler Points Movement |
T0: | | angle list of crank returned by invkinplan2 |
wcr: | | Transformation matrix list of joint A0 (only rotation) |
TA0: | | Transformation matrix list of joint B0 (only rotation) |
TB0: | | Transformation matrix list of Attachment point A1 (circular Movement) |
TA1: | | Transformation matrix list of Attachment point B1 (circular Movement) |
Examples
PS=Posesample(7);PS.CPLE = PLsquare([6 4]); checkfourbar3Poseattachpermutation(PS); PS=ans;
close all; PLofPosecentrodes(PS,56);References
- https://commons.wikimedia.org/wiki/Category:Centrodes
Copyright 2019-2025 Tim C. Lueth. All rights reserved. The code is the property of Tim C. Lueth and may not be redistributed or modified without explicit written permission. This software may be used free of charge for academic research and teaching purposes only. Commercial use, redistribution, modification, or reverse engineering is strictly prohibited. Access to source code is restricted and granted only under specific agreements. For licensing inquiries or commercial use, please contact: Tim C. Lueth
Last html export of this page out of FM database by TL: 2025-09-21