by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - 4Bar/Linkages
Introduced first in SolidGeometry 5.1, Creation date: 2021-12-02, Last change: 2025-09-15
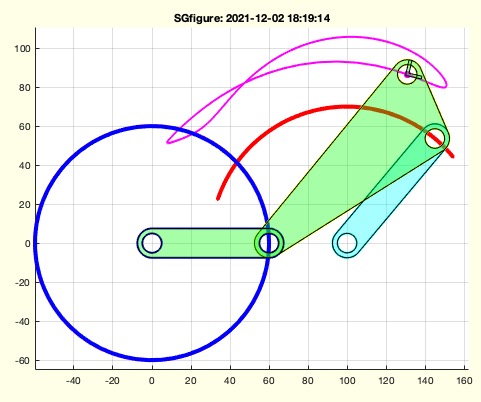
[PL0,TL0,wlim,PLC,PLS,wA1,wcr]=PLofFourbarcouplercurve(A0,B0,[A1,B1,GPLA,GPLB,wsol,CPLE,"R12","N"])
A0: | Postion of base point crank | |
B0: | Postion of base point swing | |
A1: | Endpoint of crank | |
B1: | Endpoint of swing | |
GPLA: | optional attachment point of crank at coupler | |
GPLB: | optional attachment point of swing at coupler | |
wsol: | optional angle limitations | |
CPLE: | PLots CPLE in interactive mode |
PL0: | Point list of coupler courve | |
TL0: | Frames if coupler courve | |
wlim: | angle limitation =s | |
PLC: | Point list of radial crank movement | |
PLS: | Point list of radial swing movement | |
wA1: | ||
wcr: |
SGfigure;
cla; PLofFourbarcouplercurve([0 0],[100 0],[0 60],[100 +70]); % Plot without attachment points
cla; PLofFourbarcouplercurve([0 0],[100 0],[0 60],[100 -70]); % Plot without attachment points
cla; PLofFourbarcouplercurve([0 0],[100 0],[0 60],[100 70],[-50 -20],[50 0]); % attachment points
cla; PLofFourbarcouplercurve([0 0],[100 0],[0 60],[100 70],[-50 -100],[50 0]); % attachment points