by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - 4Bar/Linkages
Introduced first in SolidGeometry 4.4, Creation date: 2019-01-05, Last change: 2025-09-14
See Also: Posesample
, Poseplot
, TofPose
, Poseui
, center3Pose
, checkfourbar3Pose
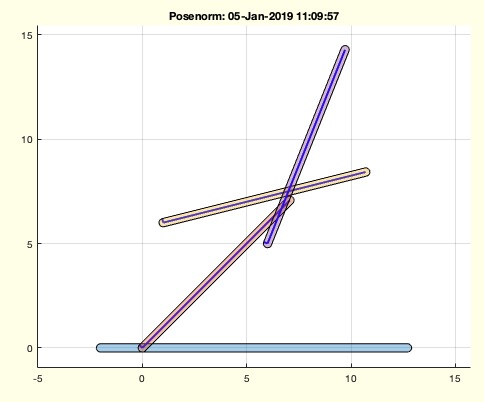
[PS,e,o]=Posenorm(PS,[l,ka])
PS: | Pose.A and Pose.B | |
l: | desired length; default is 1 | |
ka: | starting offset relative to A |
PS: | Adjusted Pose.A and Pose.B | |
e: | direction vector | |
o: | orthogonal vector |
Posenorm(Posesample(7))
Posenorm(Posesample(7),10)
Posenorm(Posesample(7),10,-10)
[a,b,c]=Posenorm(PS,10)This function, Posenorm, is designed to adjust the length of pose vectors to a common length and shift the start point. It is part of the SolidGeometry library and was introduced in version 4.4.
Pose.A and Pose.B, which represent the start and end points of pose vectors.A. The default value is 0.Pose.A and Pose.B.l and starting offset ka from the input parameters using the getfuncparams function.n by checking the size of PS.A.e and o to store direction and orthogonal vectors, respectively.v from PS.A to PS.B.v to get the direction vector e.o by rotating e 90 degrees.PS.A by adding ka times the direction vector e.PS.B to be l times the direction vector e from the new start point.Poseplot and print the adjusted pose vectors to the command line if the caller is a MATLAB script.