by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - 4Bar/Linkages
Introduced first in SolidGeometry 4.5, Creation date: 2019-03-26, Last change: 2025-09-14
See Also: checkfourbar3Poseattachpermutation
, Posefourbaranimate
, PLofPosecouplercurve
, Posefourbarangles
, Posefourbaranglelimit
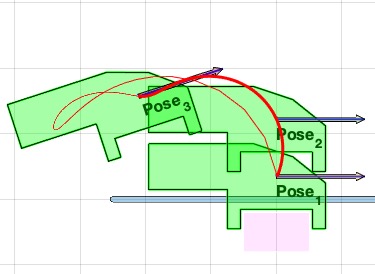
[PS,wlim,ford]=Posefourbarposelimit(PS,[aps,ford])
PS: | Pose struct including GPL and GAL | |
aps: | optional index for test | |
ford: | optional order; default is default order or 123 |
PS: | Pose struct with modified PS.GAL List and limited angles! | |
wlim: | limitation for angle [0 0] if no solution possible for input ford | |
ford: | order of poses; 0 if no solution possible for input ford |
PS=Posesample(5)
PS=checkfourbar3Poseattachpermutation(PS,3)
PS=Posefourbarposelimit(PS,2)
Posefourbaranimate(PS,2);
[[1:20]' PS.GAL(1:20,:)] % 1 2 7 17
Posefourbarposelimit(PS,7,123)
Posefourbarposelimit(PS,7,231)
Posefourbarposelimit(PS,7,312)
Posefourbarposelimit(PS,7,321)
Posefourbarposelimit(PS,7,132)
Posefourbarposelimit(PS,7,213); % Tiger Claw shape