by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Spatial Relations
Introduced first in SolidGeometry 2.1, Creation date: 2015-01-30, Last change: 2025-09-14
[PLout,varargout]=PLtrans(PLin,T)
PLin: | Point list nx2 | |
T: | Transformation Value, Vector, or Matrix |
[in,T) - multi transformation modes for a point list
% (by Tim Lueth, SG-Lib, 2015-JAN-30 as class: SPATIAL RELATIONS)
%
% Does currently not support a cells of points list
% Combines PLtrans0, PLtrans1, PLtransP, PLtransR, PLtransT depending on the
% transformation value
%
% (Status of: 2025-08-18)
%
% Introduced first in SolidGeometry 2.1
%
% See also: PLtransP, PLtransR, PLtrans0, PLtrans1, PLtransT, PLtransC
%
% [PLout,varargout]=PLtrans(PLin,T)
% === INPUT PARAMETERS ===
% PLin: Point list nx2
% T: Transformation Value, Vector, or Matrix
% === OUTPUT RESULTS ======
% [Lout,varargout]=PLtrans(PLin,T)
%
% if size(T,1)==1 && size(T,2)==1
% if T==0]: Point list nx2
% [Lout,varargout]=PLtrans(PLin,T)
%
% if size(T,1)==1 && size(T,2)==1
% if T==0]: not used yet
%
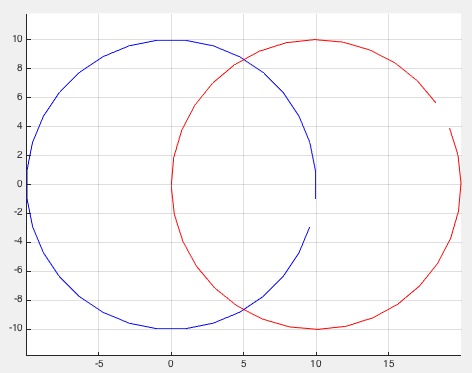
% EXAMPLE: try:
% PLtrans(PLcircle(10),[rotdeg(40) [10]: | Point list nx2 | |
[in,T) - multi transformation modes for a point list
% (by Tim Lueth, SG-Lib, 2015-JAN-30 as class: SPATIAL RELATIONS)
%
% Does currently not support a cells of points list
% Combines PLtrans0, PLtrans1, PLtransP, PLtransR, PLtransT depending on the
% transformation value
%
% (Status of: 2025-08-18)
%
% Introduced first in SolidGeometry 2.1
%
% See also: PLtransP, PLtransR, PLtrans0, PLtrans1, PLtransT, PLtransC
%
% [PLout,varargout]=PLtrans(PLin,T)
% === INPUT PARAMETERS ===
% PLin: Point list nx2
% T: Transformation Value, Vector, or Matrix
% === OUTPUT RESULTS ======
% [Lout,varargout]=PLtrans(PLin,T)
%
% if size(T,1)==1 && size(T,2)==1
% if T==0]: Point list nx2
% [Lout,varargout]=PLtrans(PLin,T)
%
% if size(T,1)==1 && size(T,2)==1
% if T==0]: not used yet
%
% EXAMPLE: try:
% PLtrans(PLcircle(10),[rotdeg(40) [10]: | not used yet |
try:
PLtrans(PLcircle(10),[rotdeg(40) [10;0]])
PLtrans(rand(20,2),0)
PLtrans(rand(20,2),1)
PLtrans(rand(20,2),[10, 0])
PLtrans(rand(20,2),[10; 0])
PLtrans(rand(20,2),rot(pi/3))
PLtrans(rand(20,2),rotdeg(40))
PLtrans(rand(20,2),[rotdeg(40) [10;0]])