by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Surfaces
Introduced first in SolidGeometry 3.1, Creation date: 2016-12-18, Last change: 2025-09-14
SGTplot(SGN,[N,SN])
SGN: | Solid Geoemtry | |
N: | Name of Frames to be plotted | |
SN: | Name of Solid for plotting |
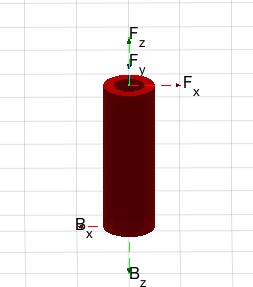
loadweb JACO_robot.mat;
SGfigure; view(-30,30); SGTplot(JC0,'','A')The function SGTplot is designed to plot solid geometries, including frames, using the Solid Geometry Toolbox (SGT). It is part of the SG-Library and was introduced in SolidGeometry 3.1. The function is authored by Tim Lueth and is intended for use in visualizing solid geometries.
The function begins by checking the number of input arguments using nargin. It assigns default values to the optional parameters N and SN if they are not provided by the user:
N.SN.After setting up the input parameters, the function calls another function SGT with the solid geometry object SGN and any additional arguments passed through varargin. The SGT function is responsible for handling the actual plotting of the solid geometry and frames based on the provided parameters.
An example of how to use the SGTplot function is provided in the comments:
loadweb JACO_robot.mat; SGfigure; view(-30,30); SGTplot(JC0,'','A')
In this example, the function is used to plot a solid geometry from the JACO_robot.mat file. The SGfigure function is called to create a new figure window, and the view function is used to set the viewing angle. The SGTplot function is then called with the solid geometry object JC0, no specific frames, and the solid name 'A'.