SGTui
by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Kinematics and Frames
Introduced first in SolidGeometry 2.1, Creation date: 2015-02-01, Last change: 2025-09-14
returns a HT matrix for a manuel selected union space
Description
(2021-12-21) THIS FUNCTION SUFFERS FROM A LOT OF CHANGES IN THE MATLAB'S USER INTERFACE since 2020a
THERE IS NOW - Control Chart Interactivity
AND CHANGES IN - zoom
see also BUGREPORT_zoom
This is a user interface for manually selecting union patches or tips (vertices) to generate frames for linking HT matrices to the solid geometries. It support 3 types of frames
a) tips
b) planar surfaces
c) spherical surfaces with feature edges
SGT changed in SG-Lib 3.9 and supports also centers of circular borders
See Also: SGTget
, SGTset
, SGTplot
, SGTremove
, TofFS
, TofFSui
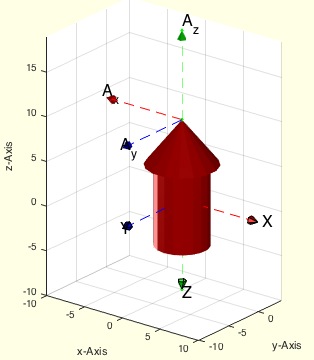
Example Illustration
Syntax
[SGN,T,h,Rorg]=SGTui(SG,[N,fe,FS,Rz])
Input Parameter
SG: | | Solid Geometry |
N: | | Name of the new/replaced Frame |
fe: | | feature edge angle; default 0.08; use 1 for freeform surfaces |
FS: | | Optional string selector for center points such as 'R1' |
Rz: | | Optional Rz rotation angle |
Output Parameter
SGN: | | New SG with Tname, T, TFiL |
T: | | Transformation matrix |
h: | | handle to graphic |
Rorg: | | |
Examples
load AIM_SGrobot; SG3=SGTremove(SG3,'all');
SG3=SGTui(SG3,[],0.3)
Copyright 2015-2025 Tim C. Lueth. All rights reserved. The code is the property of Tim C. Lueth and may not be redistributed or modified without explicit written permission. This software may be used free of charge for academic research and teaching purposes only. Commercial use, redistribution, modification, or reverse engineering is strictly prohibited. Access to source code is restricted and granted only under specific agreements. For licensing inquiries or commercial use, please contact: Tim C. Lueth
Last html export of this page out of FM database by TL: 2025-09-21