attachmentpointsofA1B1TP | returns the grid points relative to effector from A1, B1 and a coordinate or pase | 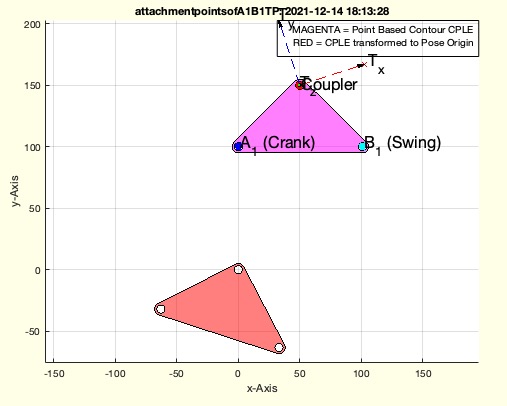 |
B1ofA1 | returns a second attachment point from a 1st Attachment point, distance and angle | 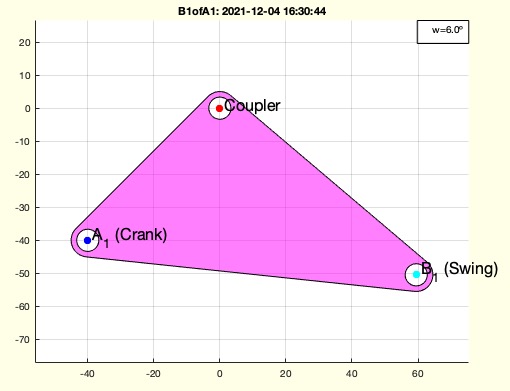 |
CPLanimateTL | generic fnct to animate a set of contour on indivual pathes | 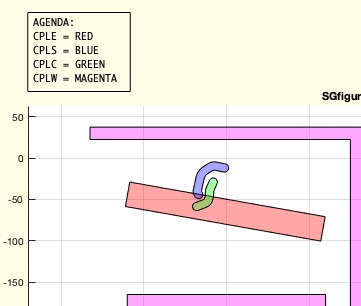 |
CPLanimateTLasSG | generic fnct to animate a set of contour on indivual pathes as 2.5 layered solid geometries | 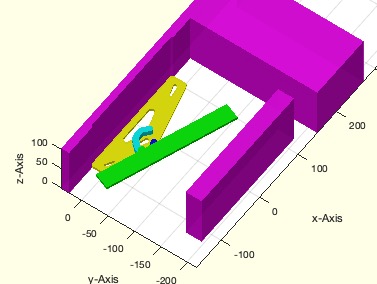 |
CPLcrossCPLpathlimit | collision detection along a path in 2D | 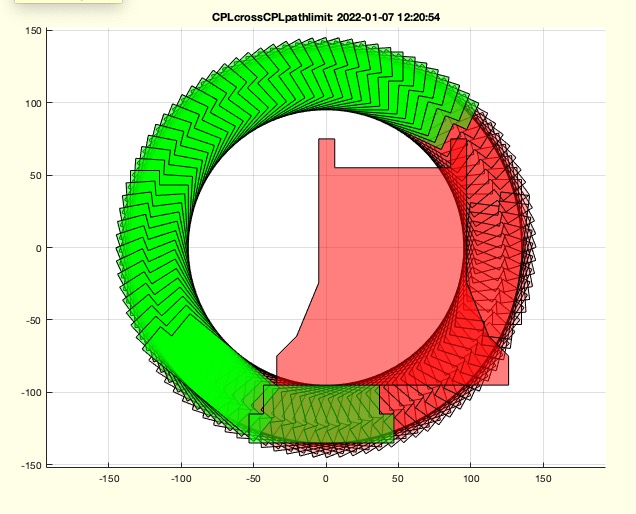 |
CPLofA1B1P | returns a CPL exactly for the given three points | 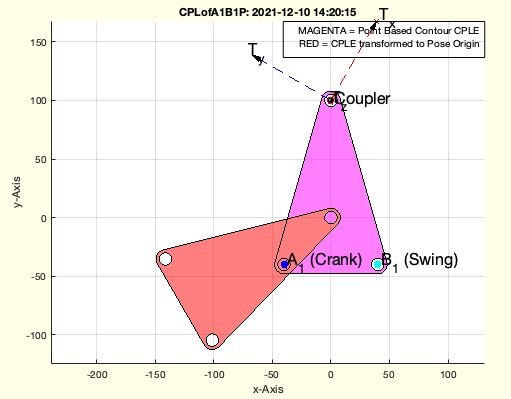 |
CPLofSGgears | provides the 2D envelope for a planar gearbox | 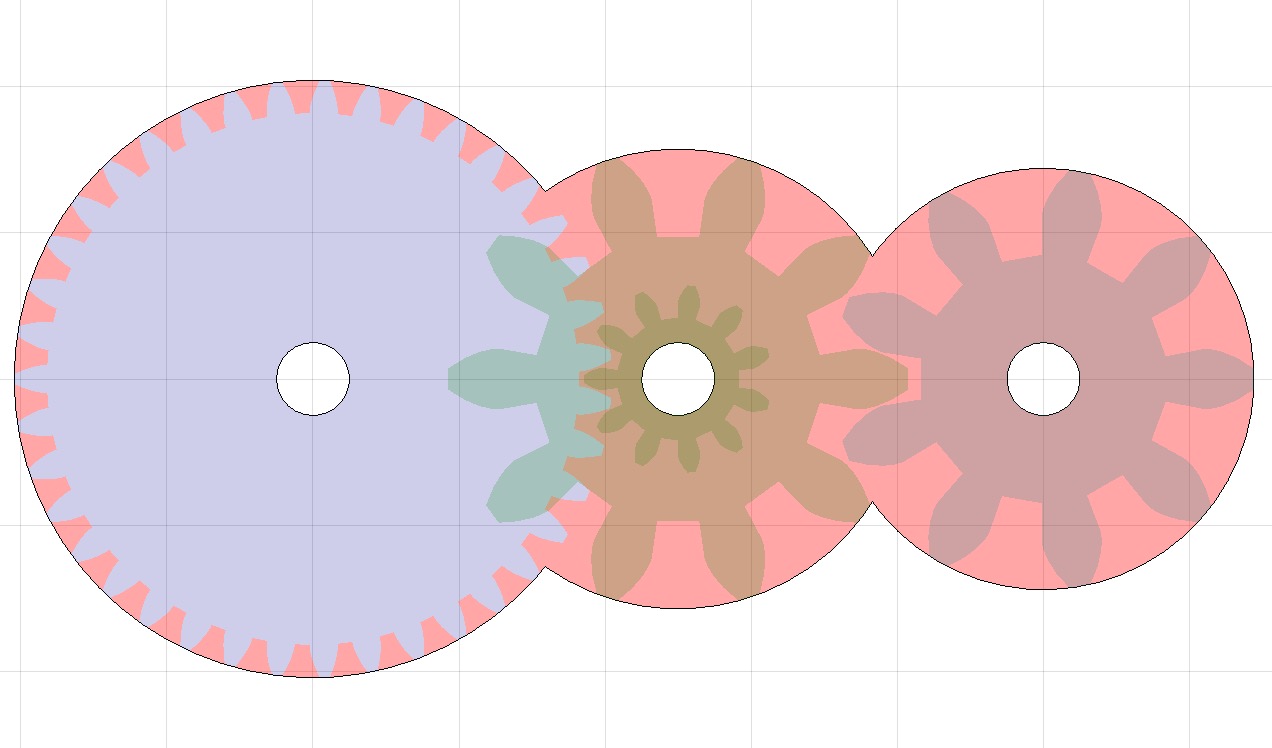 |
CPLplotTL | simply plots a contour transferred wrt to list fo frames | 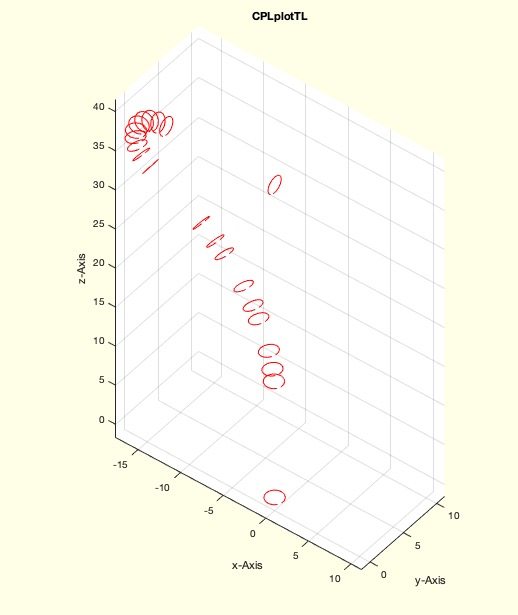 |
CPLsubtractTL | subtract a moving contour from another moving contour | 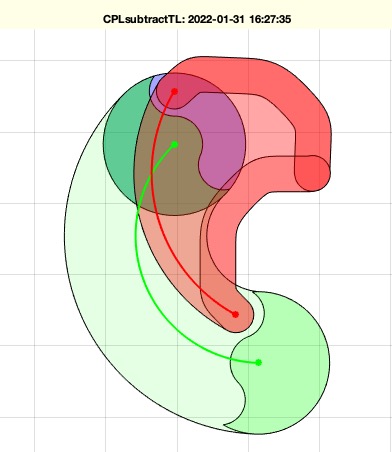 |
CPLsubtractTLasSG | collison based subtraction of moving contours | 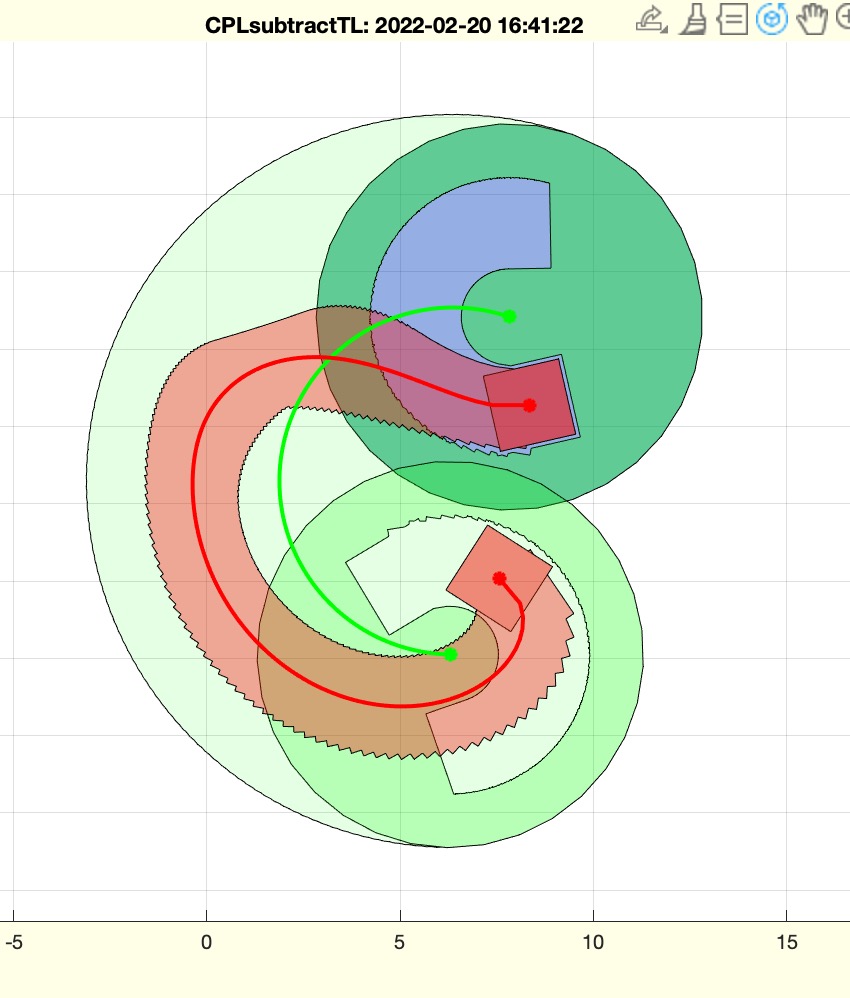 |
CPLsweepTL | returns the contour of a path swept contour | 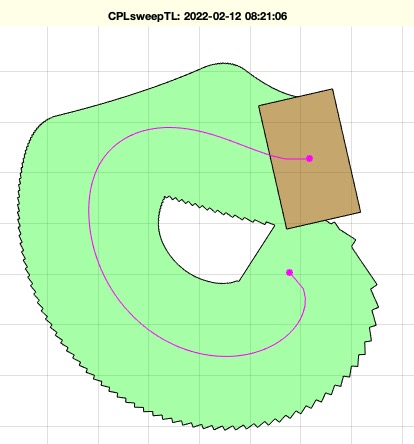 |
CPLunionTL | adds a moving contour to another moving contour | 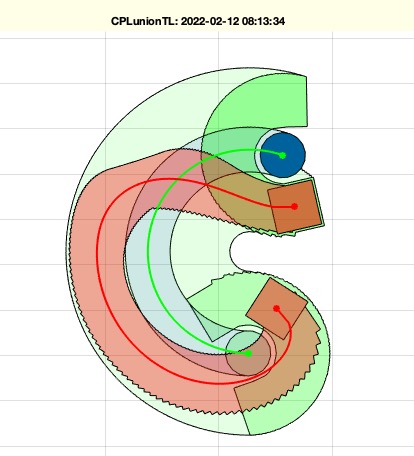 |
crosspointsVLFLofT | returns the crossing points of the axis of a coordinate system | 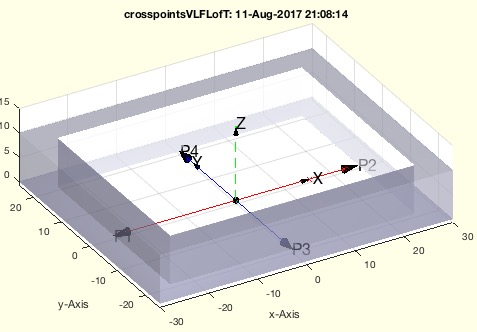 |
diffT | returns the difference between 2 4x4 HT matrices | 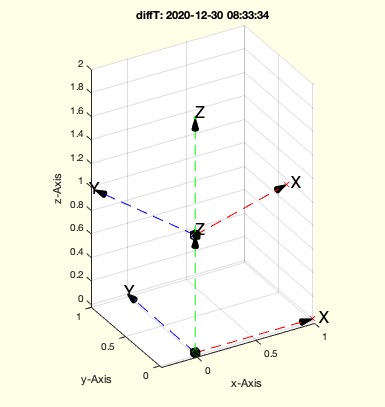 |
ELgraphleafs | separates open branches in a edge list tree | 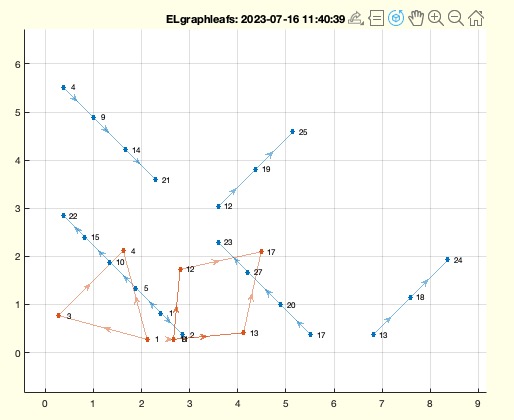 |
ezofT | just returns the ez vector of an HT Matrix as row | 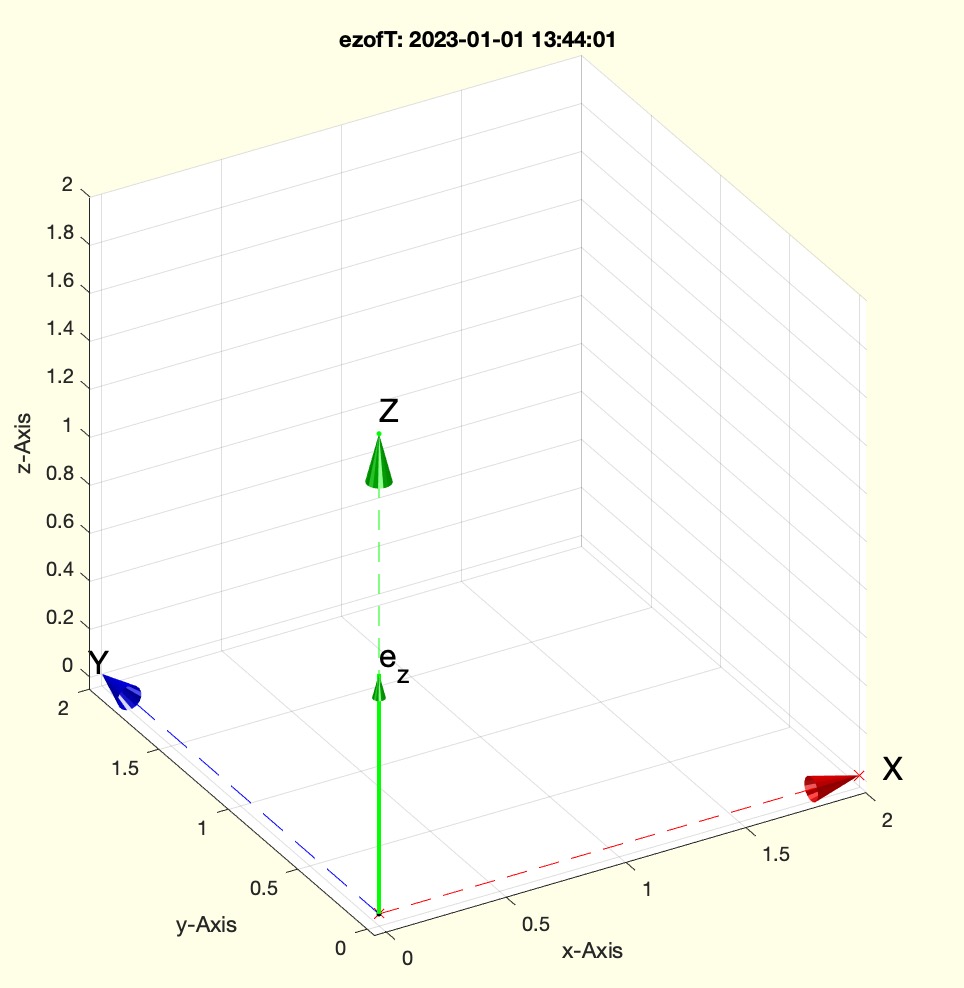 |
forwkinrplan3 | forward kinematic of a planar rz 2 arm rotating around an arm z axis | 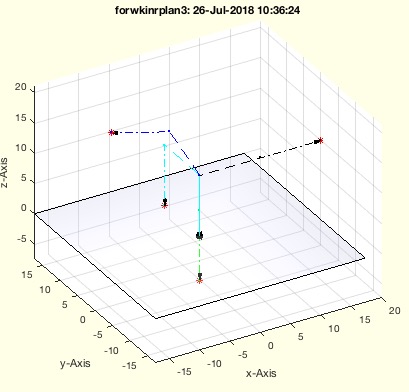 |
HTplot | plots a HT matrix |  |
invkinrplan3 | returns the angles for a rotating planar two arm kinematic |  |
iscollofSG | calculate collision vertices of two solids or a solid chain | 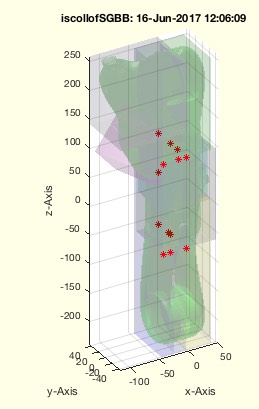 |
isequalT | returns the difference between 2 4x4 HT matrices | 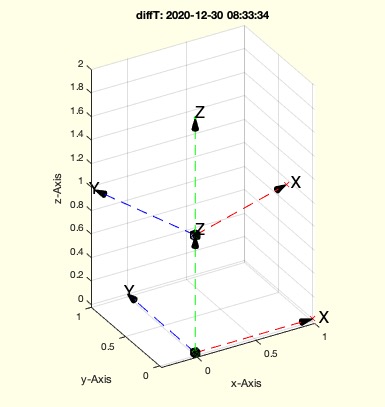 |
isT | returns whether a variable is a HT matrix or a list of HT matrices | 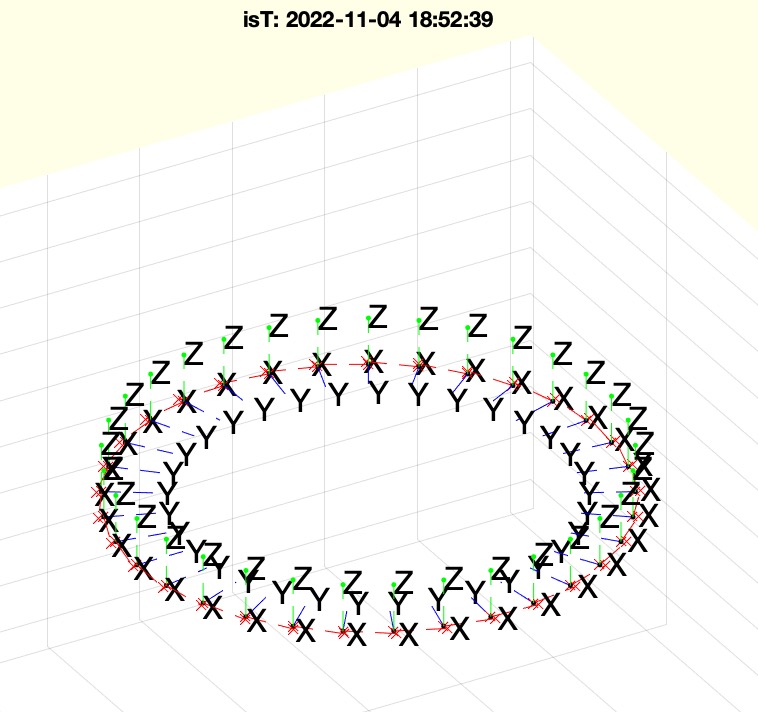 |
KMchain | calculates a kinematic structure from a given frame chain |  |
KMofSGs | returns a Kinematic model for a chain of solids | 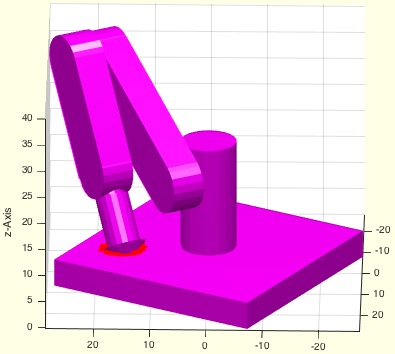 |
KMplot | plots all parts of a kinematic model |  |
KMreset | set all position frames of a kinematic model to eye(4) |  |
KMT | returns a HT-Matrix from a kinematic model |  |
L1L2RofBasenAttachmentpoints | returns dimensions from base points and attachment points |  |
layerspacerlength | returns the levels of the spacer for collision avoidance and shaping |  |
mat2celldim3 | converts an [a:b:n] array into a cell list {n x [a b]} |  |
miofPLA0B0 | returns the index of the minimal relative angle to the axis between A0 and B0 | 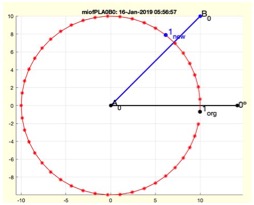 |
mofzd | returns the module if diameter and number of teeth are known | 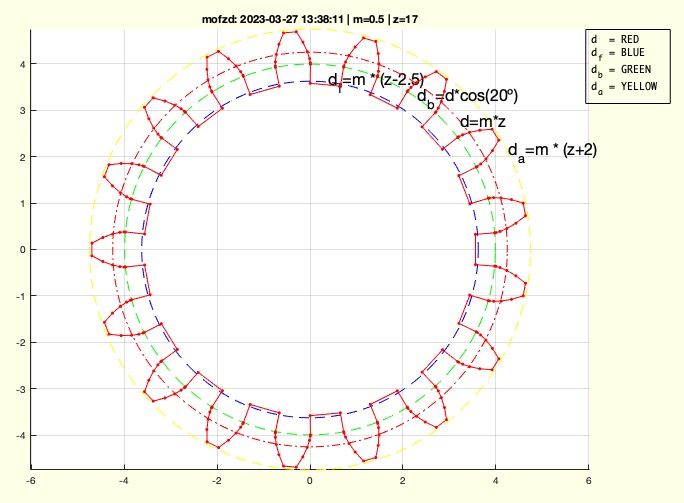 |
mzs | returns a modified module for a giben number of teeth and slot | 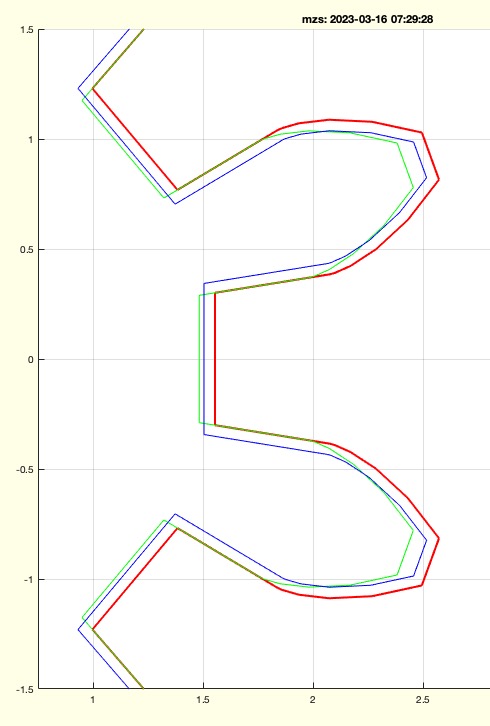 |
PLofT | returns a point list path from the translation part of a list of HT matrices | 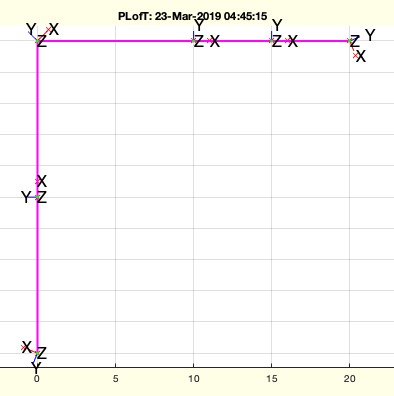 |
pofSG | returns a position based on spatial relations of SGtransrelSG | 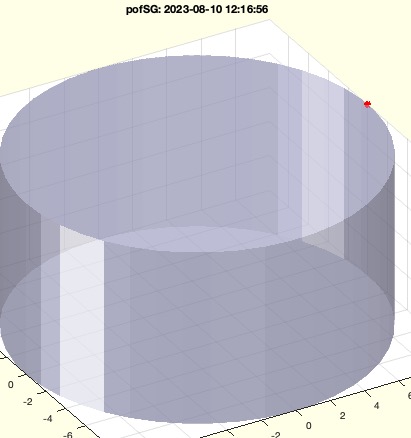 |
pofT | returns the translation part of frames or frame lists | 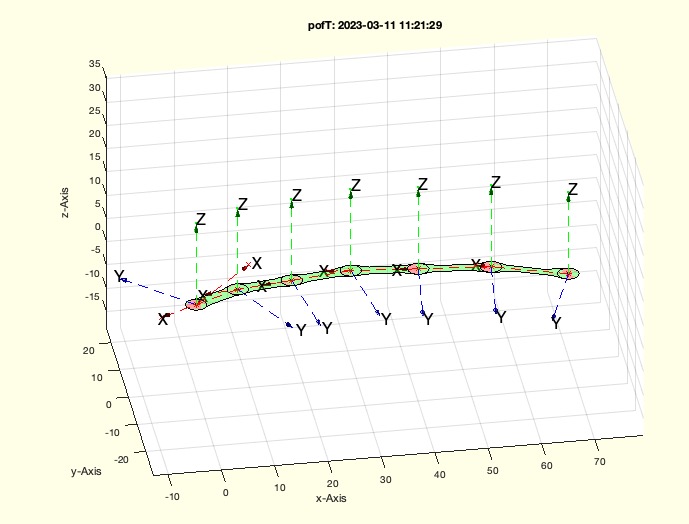 |
radofT | returns only the radian turning angles of a list of T@ matrices | 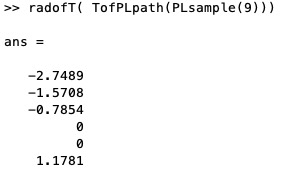 |
ROBgetJointPosition | returns the position of a set of joints of a robot |  |
SGanalyzecrosscenter | approximates the center points of intruding surfaces | 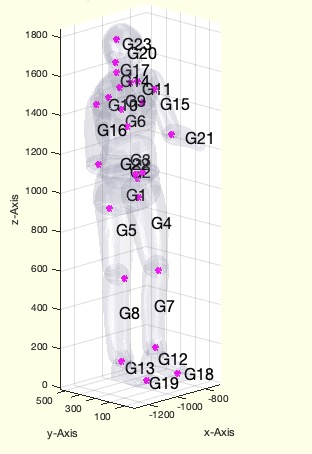 |
SGanalyzeJointFaces | returns joint type, Stator and Mover and Frame of Joint |  |
SGattach2SG | Assembles parts interactively by surface attachment |  |
SGcenterFS | directly centers the desired feature surface |  |
SGcutTextrudeT | returns a cutted an elongated solid by extrusion of the crosssection plane | 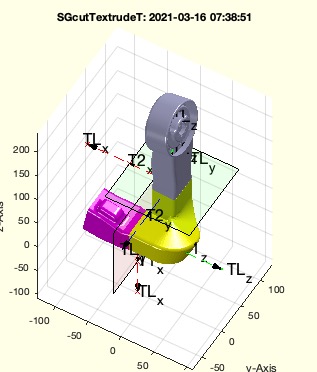 |
SGgearchainrotate | rotates the axes of a gear chain | 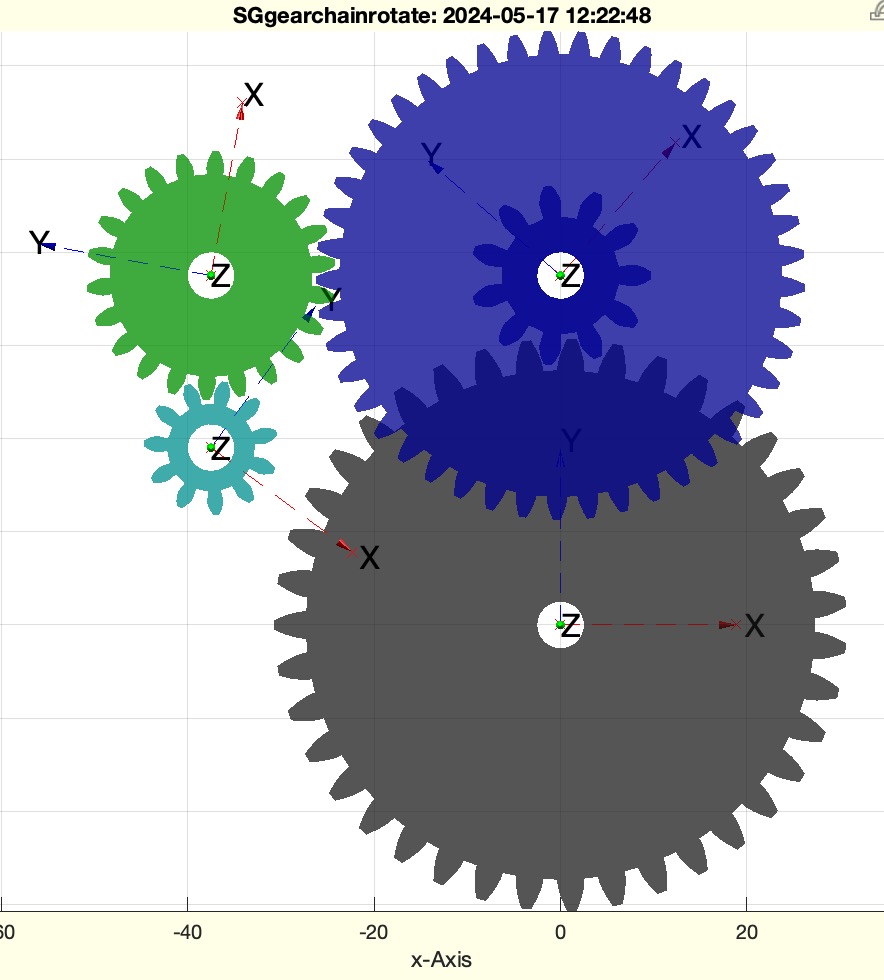 |
SGgearchainstraight | brings all the axes of a gear chain in a straight line | 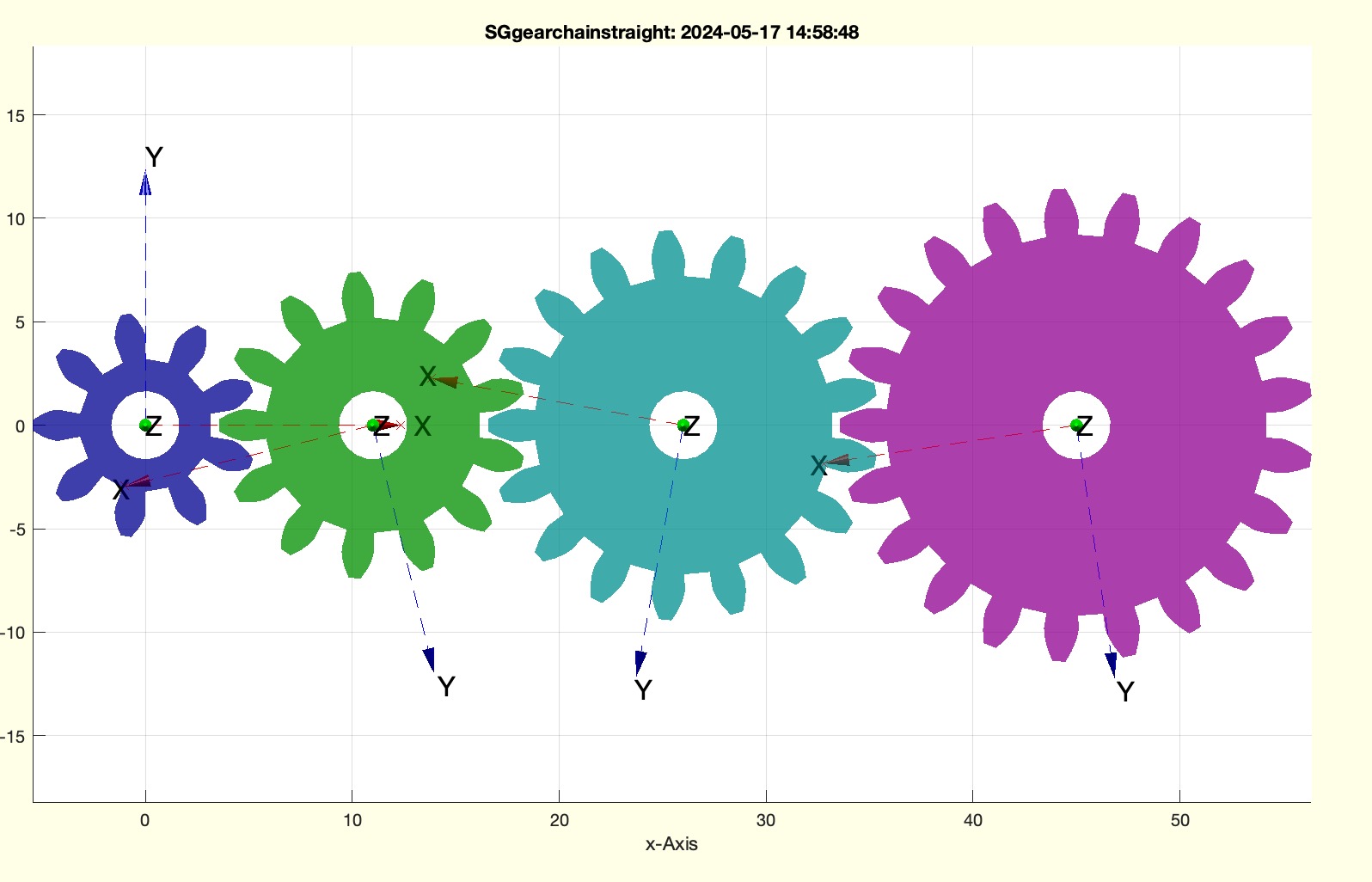 |
SGgearchainwindup | returns a gear chain for a windup motor or a minimal size gear box - use SGgearstamp afterwards | 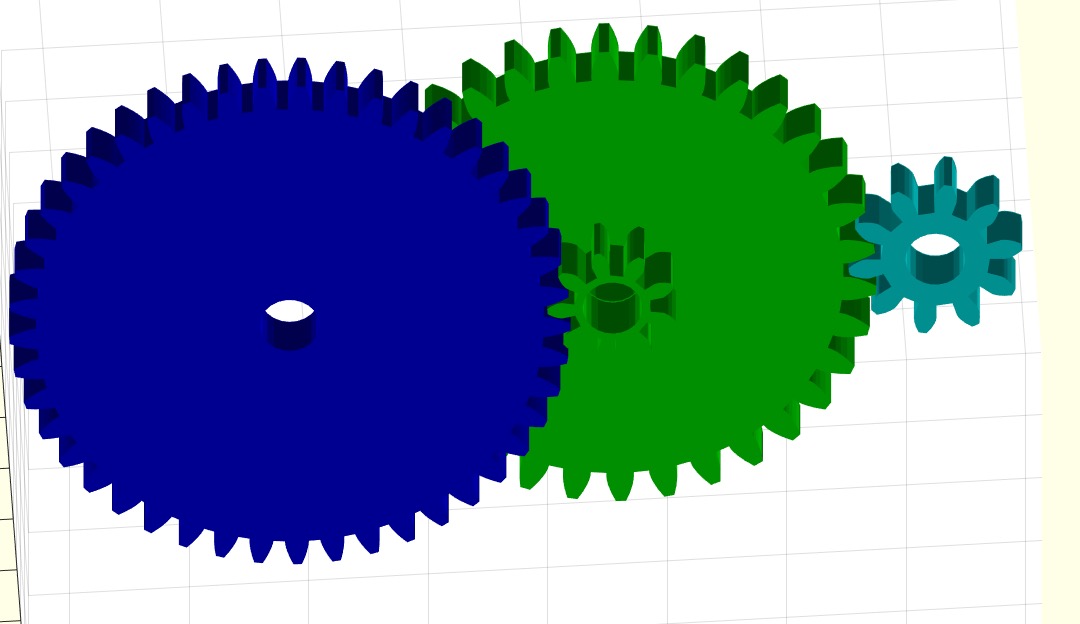 |
SGgearstamp | Marks gear wheels with numbers or text | 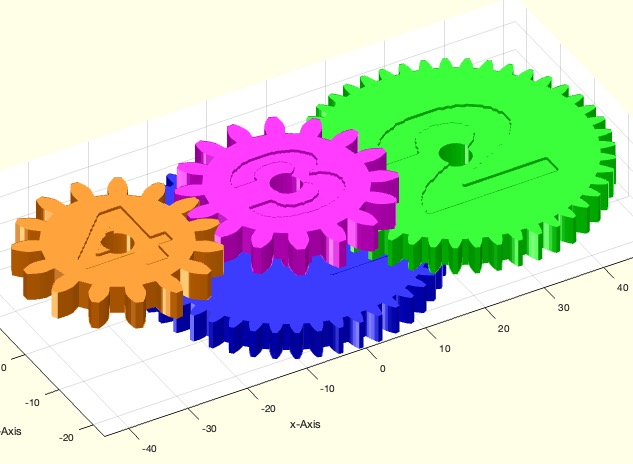 |
SGisinternalframe | returns weather a frame is an internal frame of a solid | 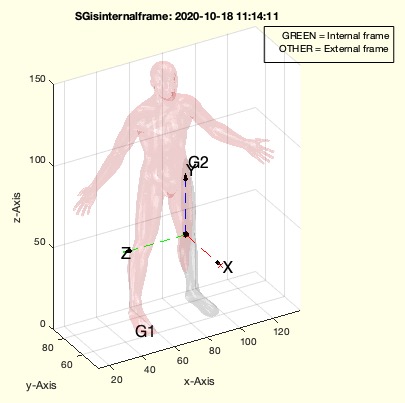 |
SGissurfaceframe | returns weather a frame is an outword or inward frame for a solid | 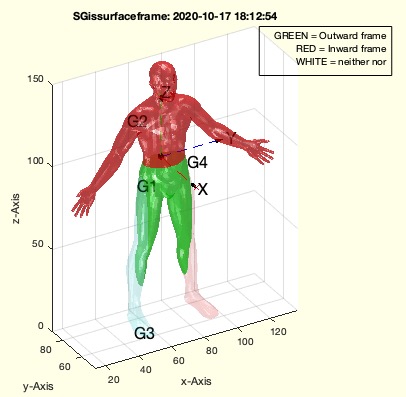 |
SGManipulator03Base | Base, and Hand for Manipulator Design # 3 |  |
SGManipulator03Link | Link and Link extender for Manipulator Design # 3 |  |
SGManipulator04Base | Plate, Base, and Hand for Manipulator Design # 4 |  |
SGManipulator04Link | Link and Link extender for Manipulator Design # 4 |  |
SGManipulator05Base | Plate, Base, and Hand for Manipulator Design # 5 |  |
SGManipulator05Link | Link and Link extender for Manipulator Design # 5 |  |
SGManipulator07Link | Link and Link extender for Manipulator Design # 4 |  |
SGManipulatorBase | Plate, Base, and Hand for Manipulator Design # 4 |  |
SGManipulatorLink | Link with 2 Frames to create mechanisms or |  |
SGN2SGT | finds hidden coded frames in a SG and creates frames for the solid | 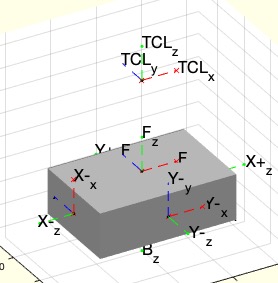 |
SGofR12 | creates a solid to show the minimal solid size for assembly methods | 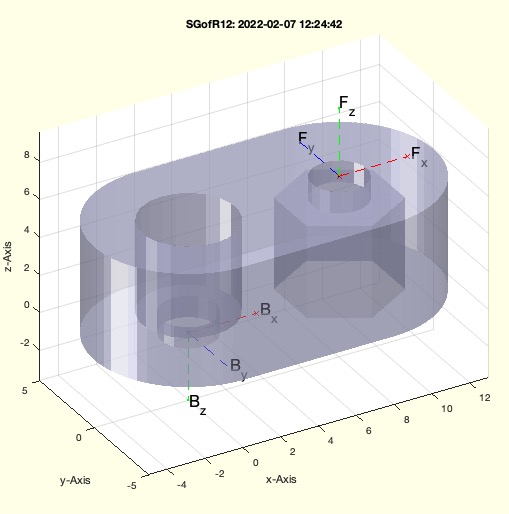 |
SGrotate | returns a solid rotated around the center of the solid | 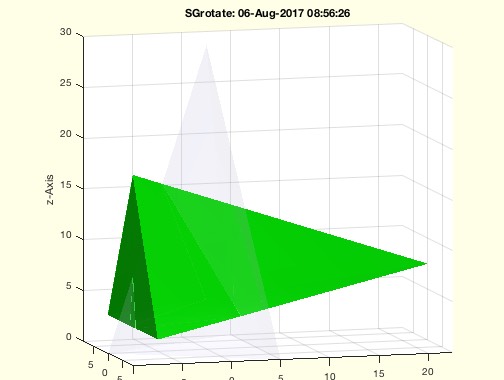 |
SGT2SGN | inserts frame information into the vertices and facets of a SG and removes the frame structures | 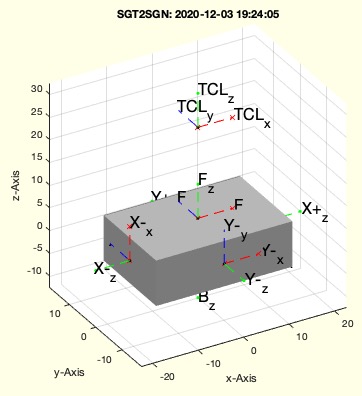 |
SGTalignT | aligns two frame to have same ey-vectors by opposite ez vectors | 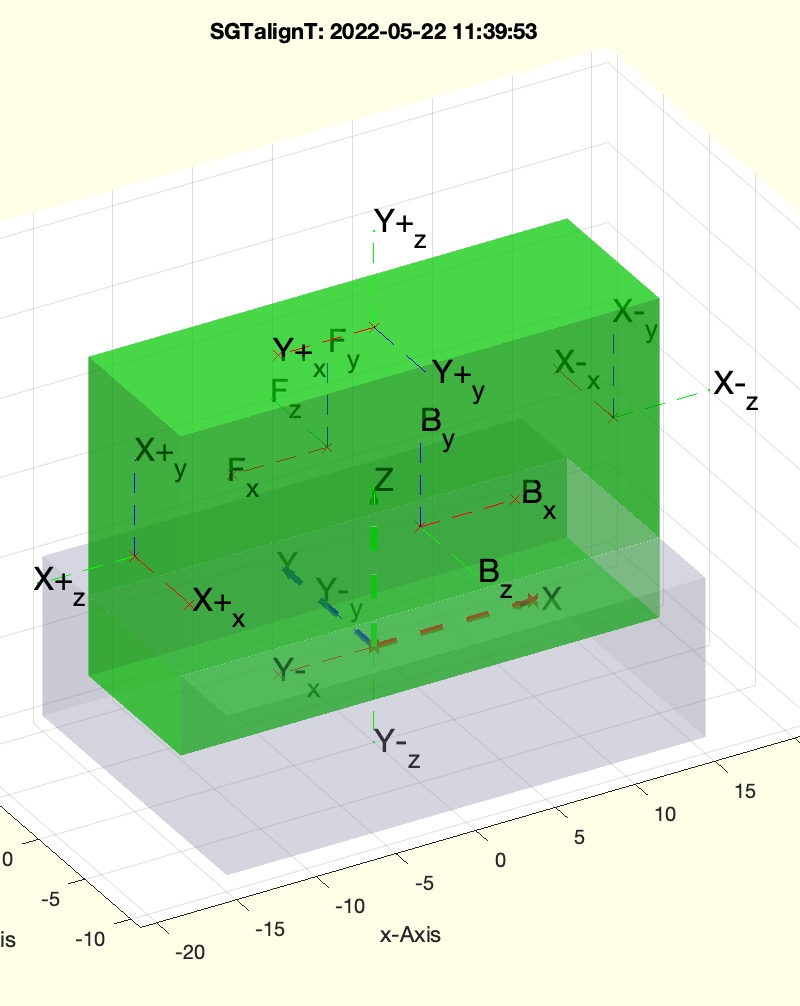 |
SGTalignT | aligns two frame to have same ey-vectors by opposite ez vectors | 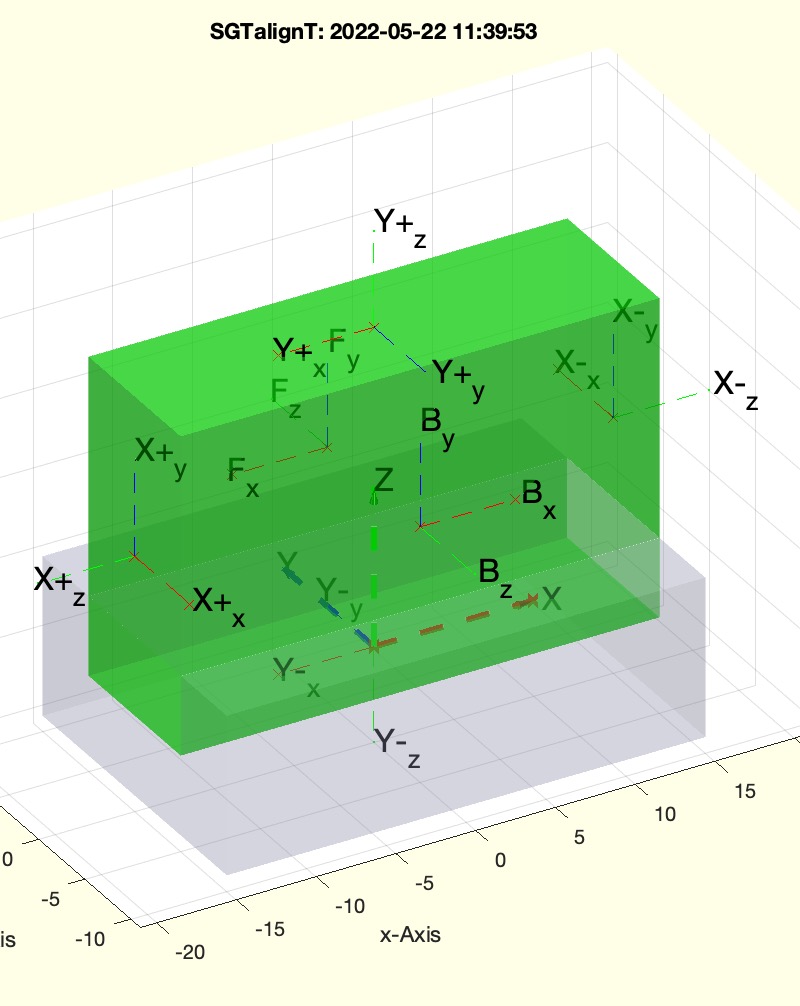 |
SGTbaseunderSG | creates a solid as base plated under a given solid | 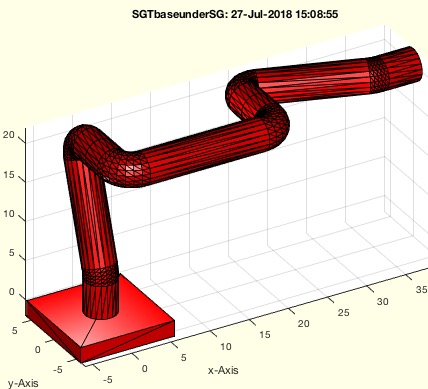 |
SGTBB | replaces the complex surface geometry by a simplified bounding box |  |
SGTcalibchain | changes the base frames of a set of solid geoemtries | 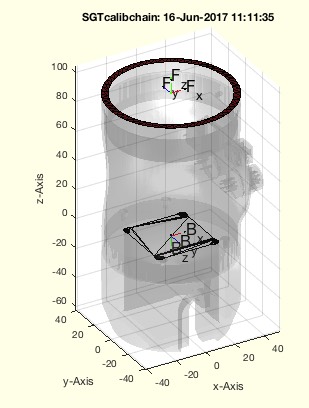 |
SGTchain | returns the spatial transformed solids of a kinematic chain | 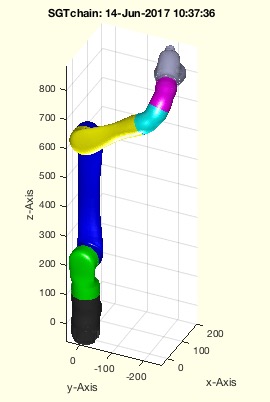 |
SGTchainanimation | creates an animation of kinematic chains | 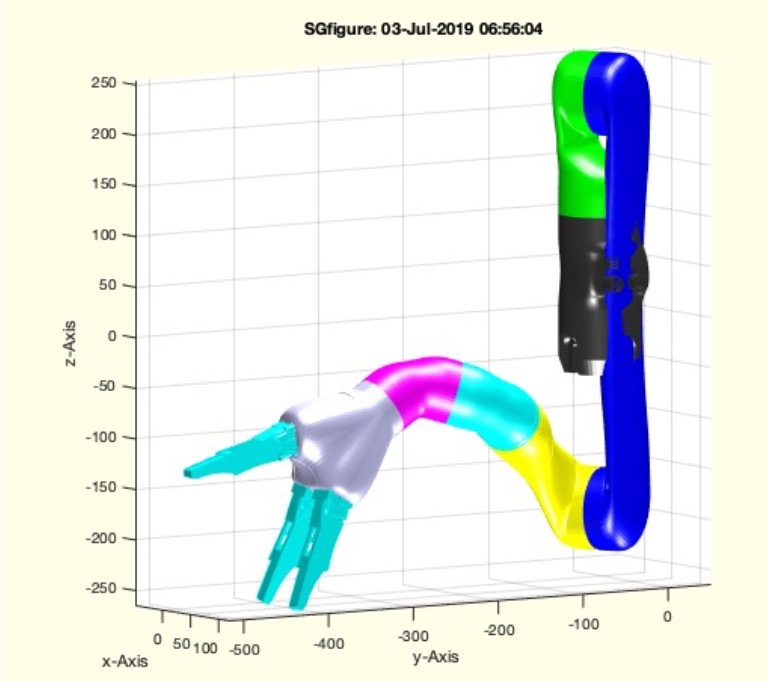 |
SGTcopy | copies Frames from one Solid into another one | 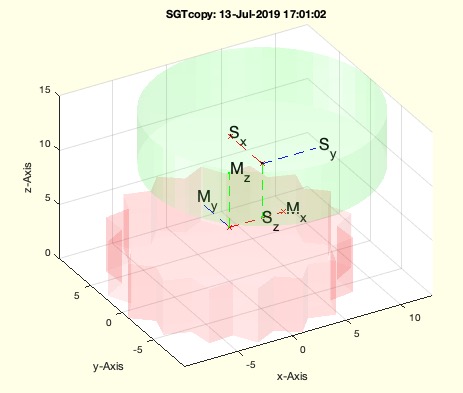 |
SGTcopyasopponent | copies a frame that crosses a surface as surface frame |  |
SGTcopyinteralframes | copies frames of a solid which are located into the goal solid |  |
SGTcopynames | copies Frames from one Solid into another one |  |
SGTcopysurfaceframesout | copies all frames from one solid to another solid if the frames are outward frames |  |
SGTcut | cuts a solid a an internal frame into separated pieced by a blade |  |
SGTduplicateframe | duplicates a single frame of solid using a new name | 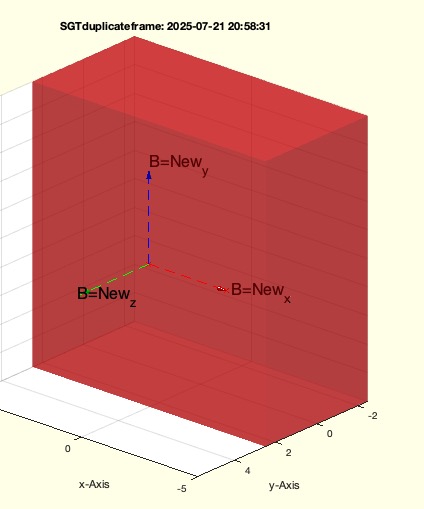 |
SGTframeChain | returns a list of frame connections for a cell list if solids | 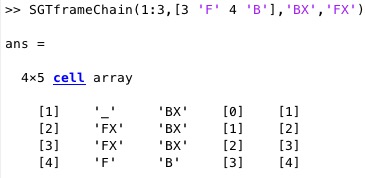 |
SGTframerot | returns a frame of a solid | 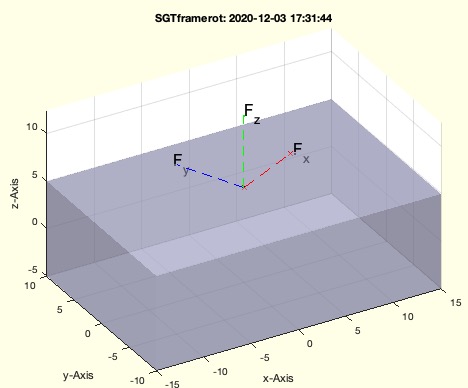 |
SGTframeselect | Fnct to select frame set | 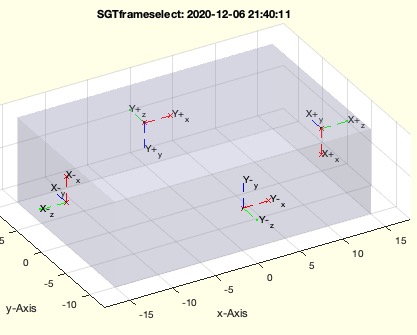 |
SGTframeselectrename | select frames, rename one, and remove the selected frames that were not renamed | 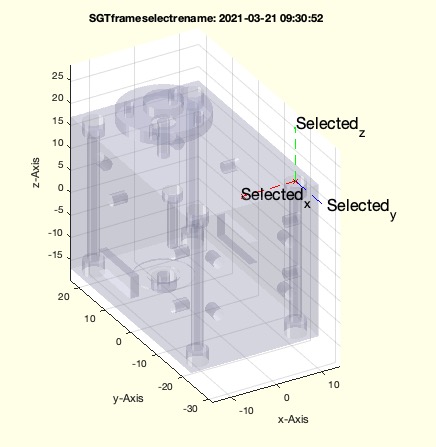 |
SGTget | returns a named frame of a solid geometry | 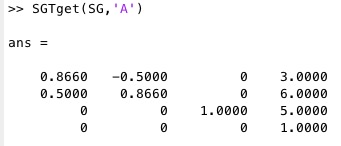 |
SGTgetframeinfo | returns some basic information about a frame inside a solid |  |
SGTmatchT | matches two frame to have same ey-vectors ez and ex vectors | 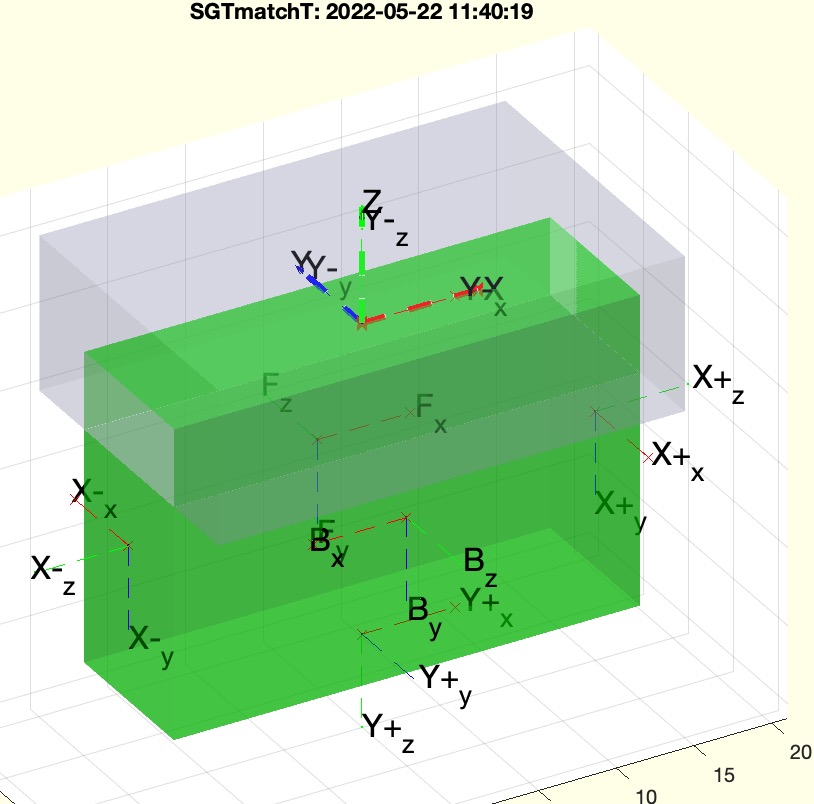 |
SGTofDenavitHartenberg | returns from Denavit-Hartenberg values, a solid, frames and a symbolic description for DH | 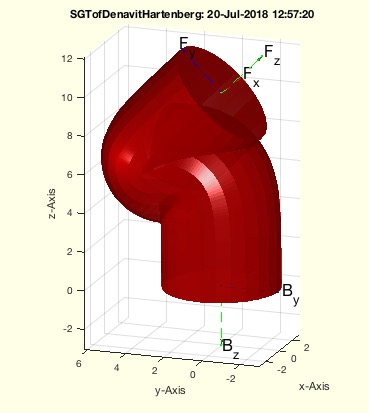 |
SGTofDHset | returns the solids for a kinematic chain defined by DH parameter | 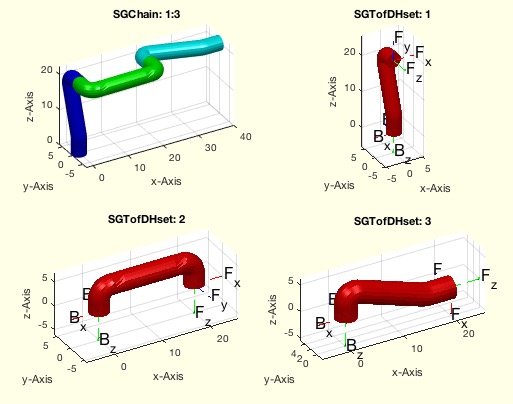 |
SGtransTui | interactive fnct to fix a surface to the ground or another solid's surface | 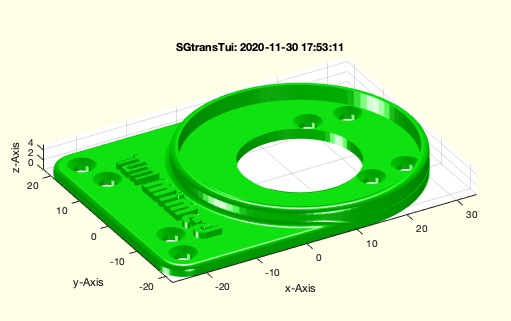 |
SGTregisterframes | finds the optimal HT matrix to register two sets of frames | 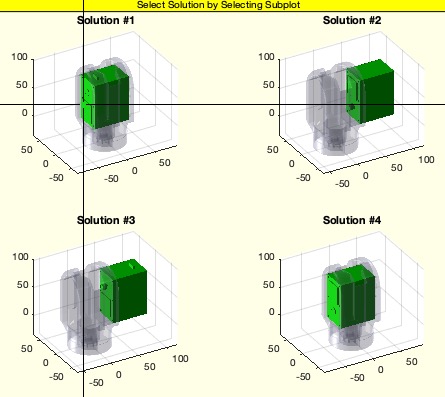 |
SGTremove | removes a transformation frame from a solid geometry | 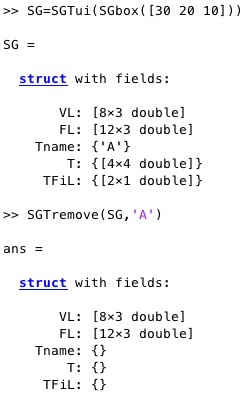 |
SGTremovedistframes | removes frames that are outside the bounding box of the surface of a solid | 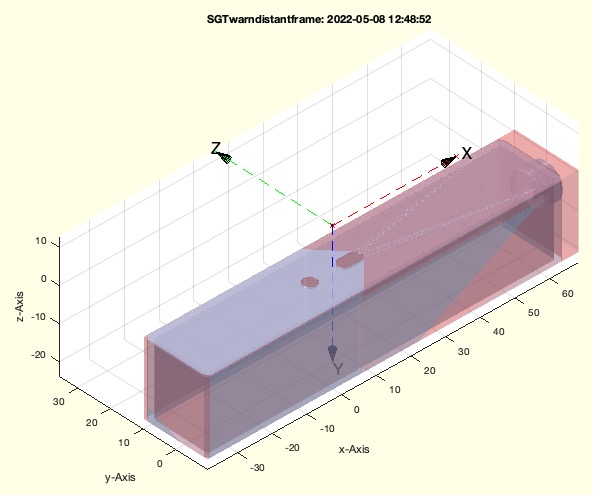 |
SGTremoverelT | removes frames from an SGT that fullfill a condition | 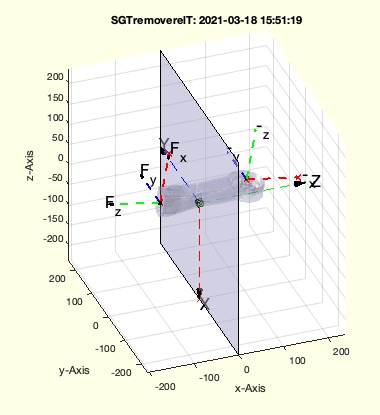 |
SGTrename | renames a frame of a solid geometry | 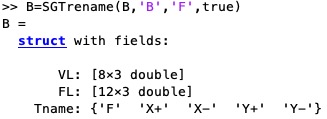 |
SGTretain | removes frames but retains some | 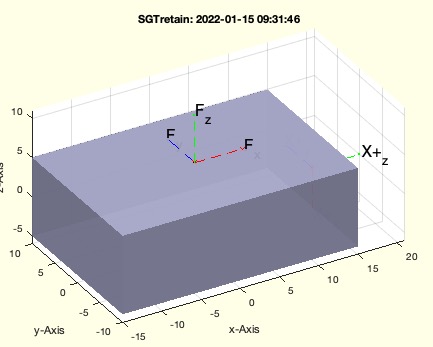 |
SGTrotate | returns a solid rotated around a Frame coordinate System | 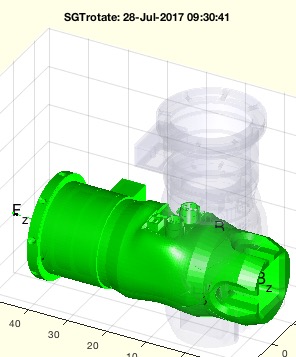 |
SGTset | sets or replaces a named frame of a solid geometry | 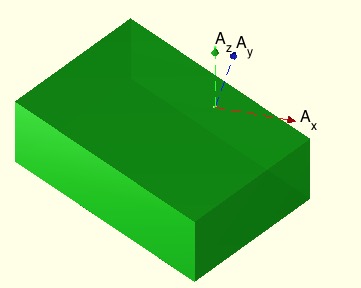 |
SGTsetBF | set frames 'B' and 'F' at default positions | 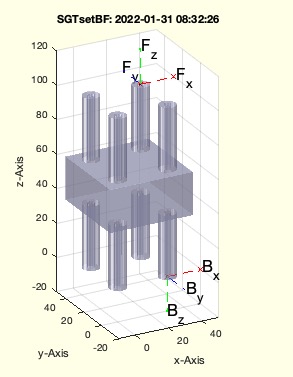 |
SGTsetBFsimple | adds base frame and follower frame to a solid | 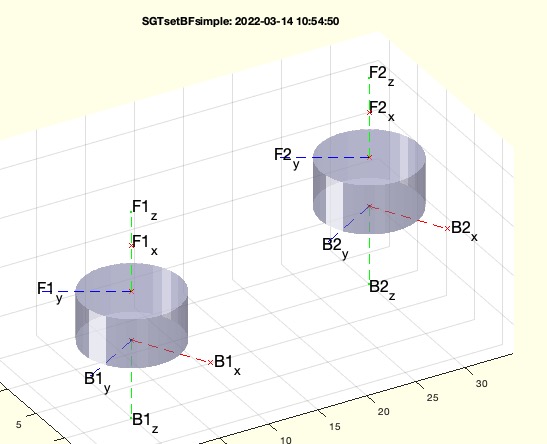 |
SGTsetinternalframe | records coordinate frames based on optional user interaction | 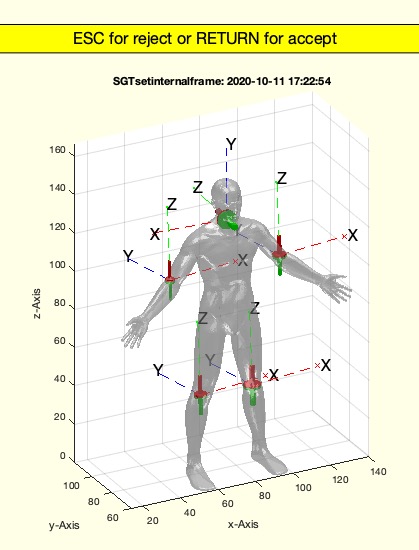 |
SGTsetofFS | creates a frame based on a features surface and a selector | 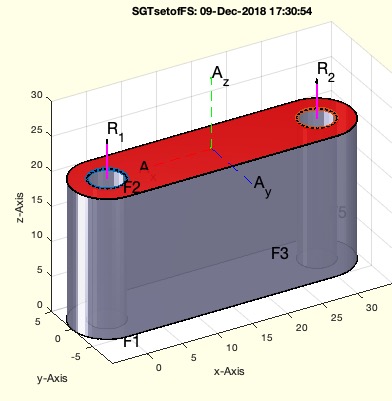 |
SGTsetofRL | creates frames from radial contour of a surface | 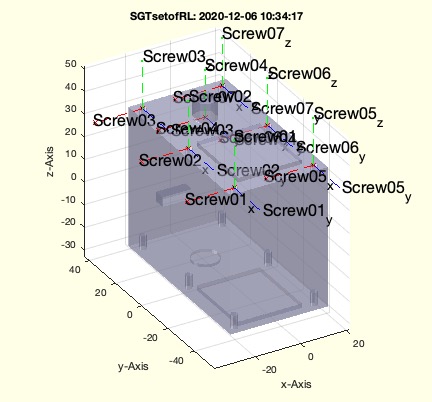 |
SGTsetofRLcenter | returns a frame of a surface that is defined by drilling holes | 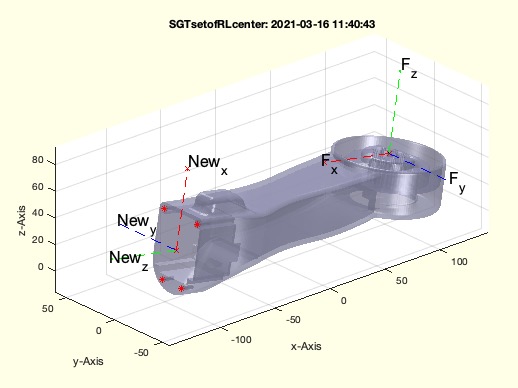 |
SGTsetorigin | moves the solid into a position that the base frame become the origin | 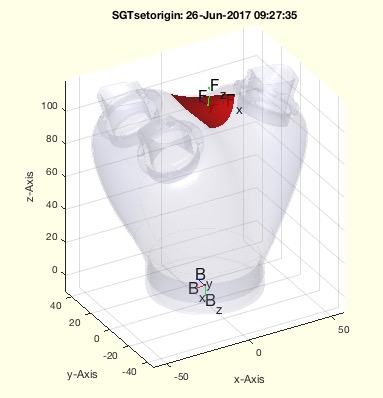 |
SGTsetTL | adds a set of frames to a solid | 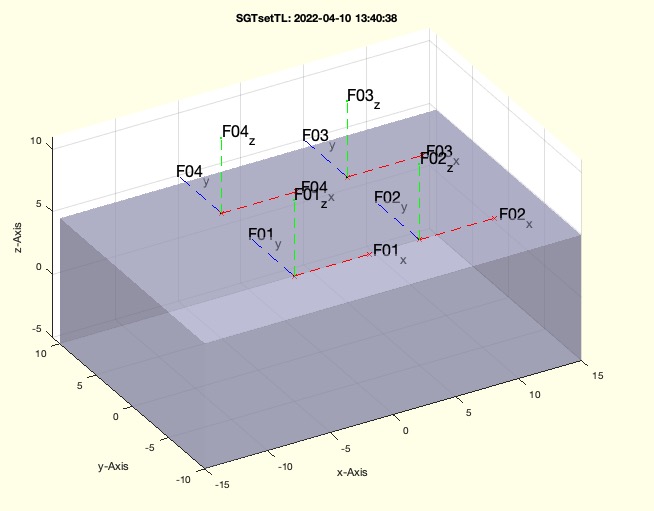 |
SGTswap | Swaps two frames of a Solid | 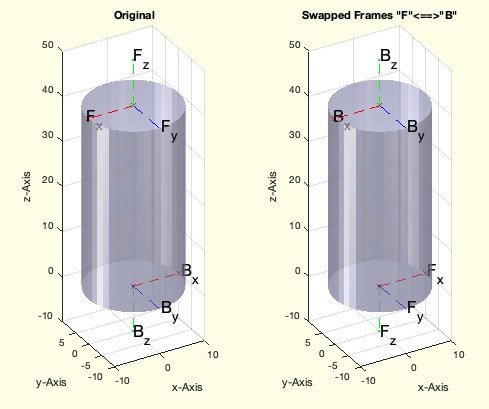 |
SGTtransR | rotates a selected frame of a solid | 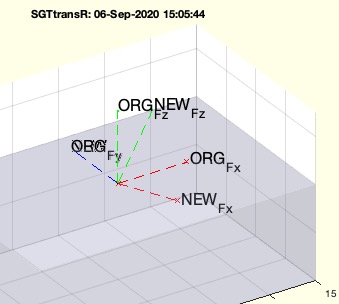 |
SGTtransT | Desired, but ambiguous, so only a help text is displayed. | 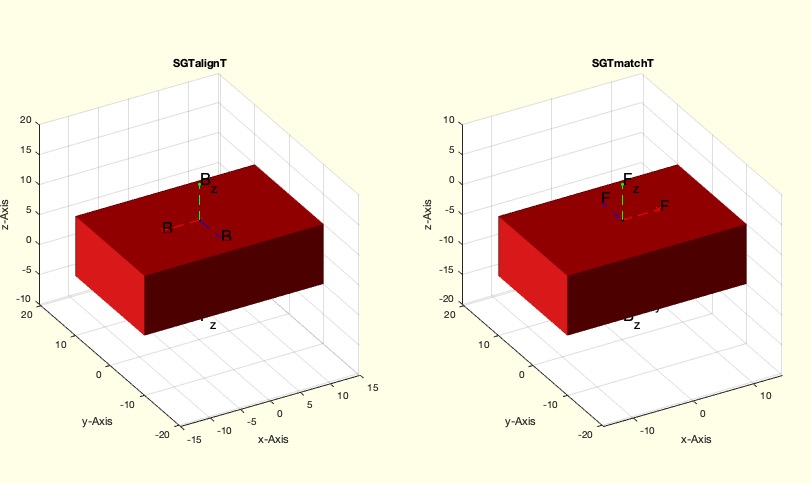 |
SGTui | returns a HT matrix for a manuel selected union space |  |
SGturnfaces | rotates a solid wrt to the largest orthogonal feature surfaces | 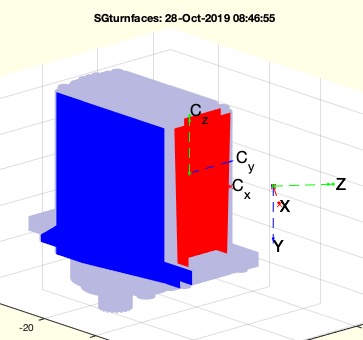 |
slpitch | returns the required fit dimension for steep screw thread |  |
T2ofCVLpath | Returns Start frame and End Frame for a Contour path | 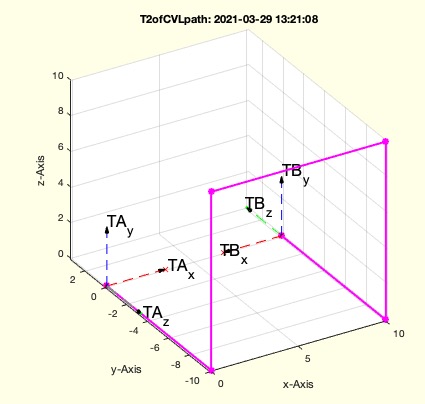 |
T2ofT3 | returns 3x3 matrices from 4x4 matrices | 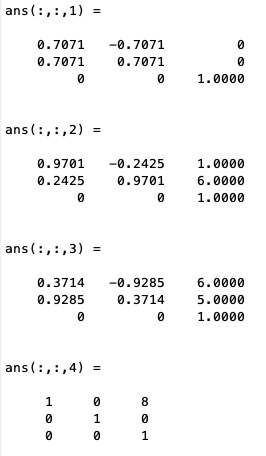 |
T3ofT2 | converts a 3x3 HT-Matrix into a 4x4 HT-Matrix | 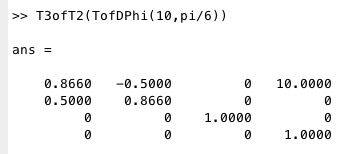 |
TcopyVLez | creates frames at specific positions in space | 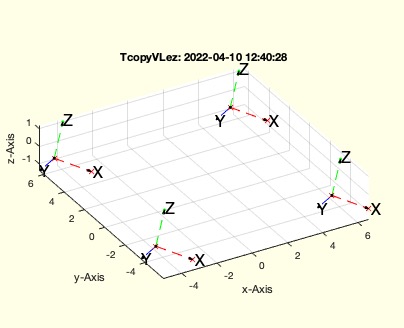 |
Tflipz | rotates / flips the ez axis of a HT matrix around by by 90 degree | 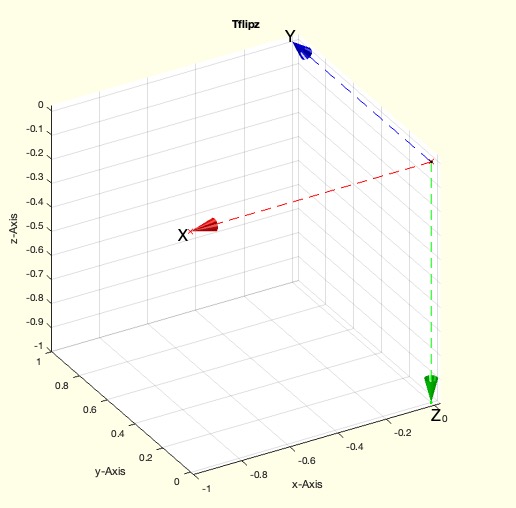 |
TLadjustR | takes a List of Frames and adjustst start and end frame to T1 and T2 | 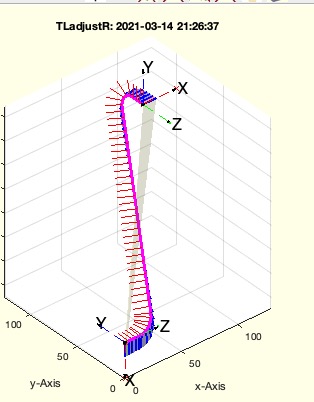 |
TLL2TL | Converts a long list of frames into an array of frames | 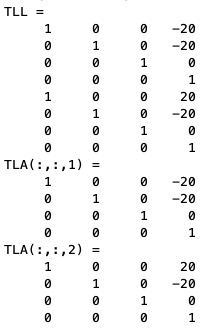 |
TLof2T | returns a list of Frames between a start frame and an end frame | 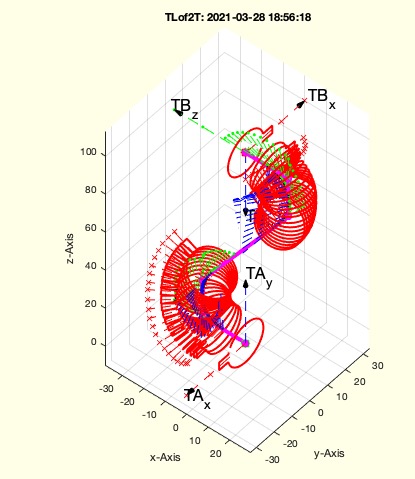 |
TLofn | returns a frame 1 of 36 with different ez vector and orientation | 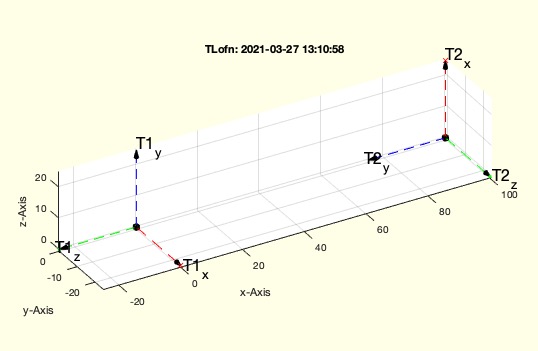 |
TLofPL | returns transformation frames for a PL | 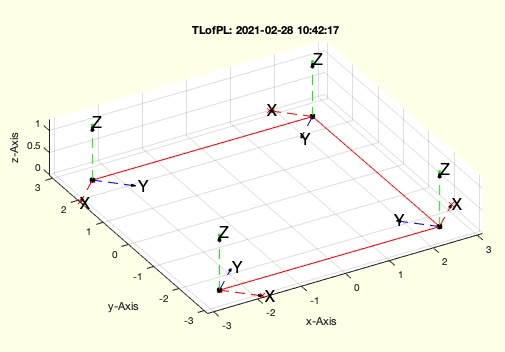 |
TLplots | plots a list of HT matrices with plane, normal vector and prthogonal vectors | 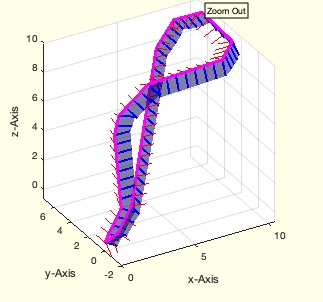 |
TLvaryfrom | this fnct takes a frame list and adds small values to the position and orientation |  |
TmirrorTxy | mirrors frames or cell list of frames |  |
Tof2P | returns a 4x4 HT matrix given by a point p and a vector ez [1st named T2P] | 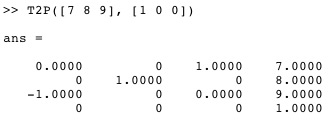 |
Tof2Tcrossez | adjusts the position of frames relative to a crossing point with another frame | 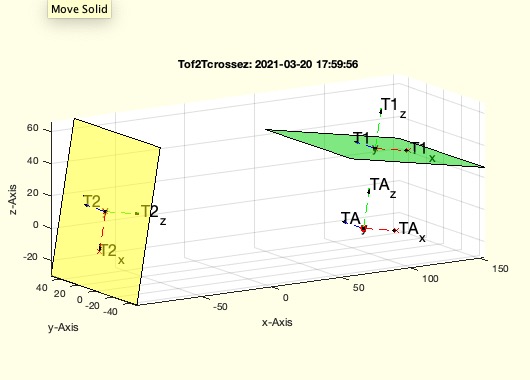 |
Tof3P | returns a 4x4 HT matrix given by three points (sort3P) |  |
TofA1B1GPL | Returns the Frame of the Pose wrt to |  |
Tofchar | creates an HT frame based on spatial relations |  |
TofCPLT | creates a list of frames inside a CPL or a planar CVL |  |
TofcrossedSG | finds a surface point using ez of T and creates a frame | 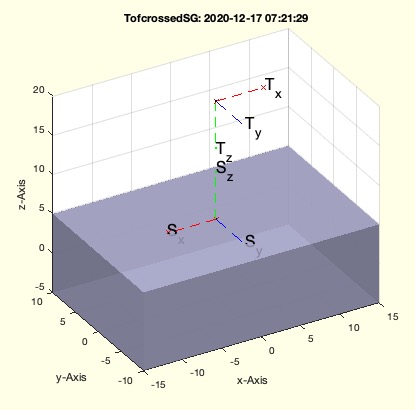 |
TofDPhi | returns a 3x3 HT matrix for 2D link | 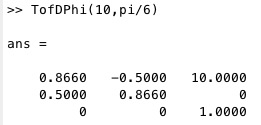 |
TofFS | returns a HT matrix for a speficied feature surface |  |
TofFSoutlinecenter | returns the HT Matrix fo the center of the FS | 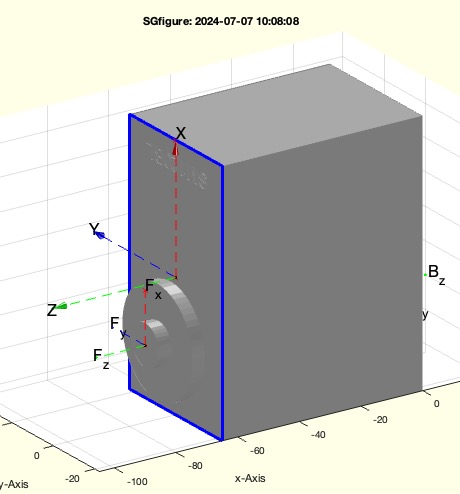 |
TofFSRLcenter | returns a Frame based on the smallest found radii inside a surface | 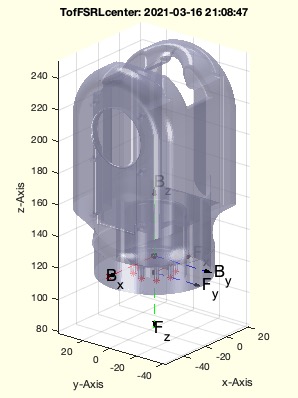 |
TofFSui | returns the frames of a touched surface | 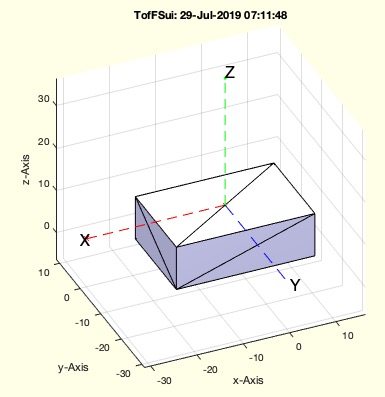 |
TofLR | returns a 2D link matrix or a 3D link matrix | 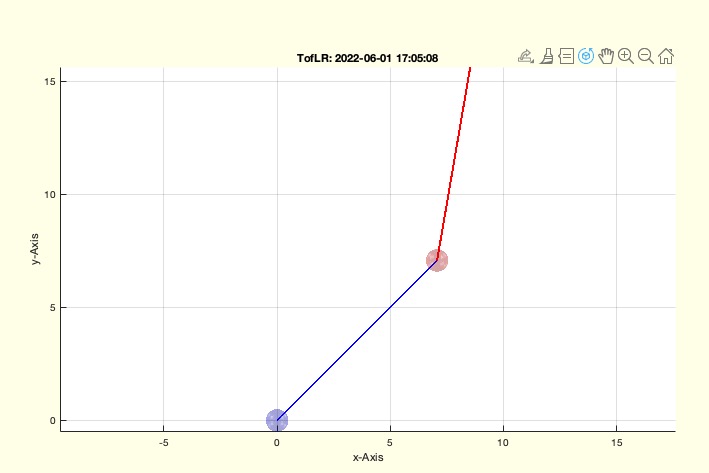 |
Tofn | provides a standardized test frame from 1 of 36 with different ez-vector and orientation | 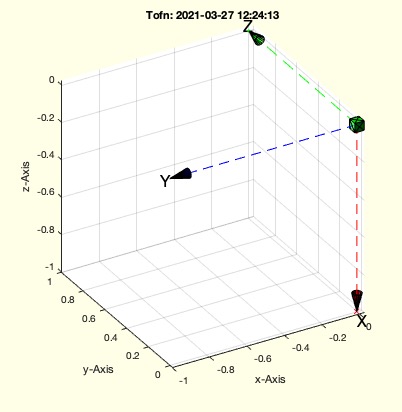 |
Tofplaneparam | returns the T matrix form for a plane parameter description - ax+by+cz+d=0 | 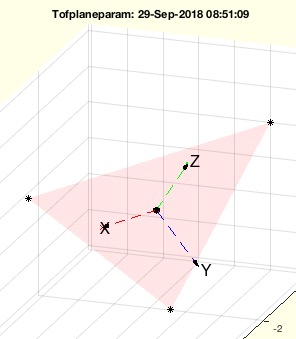 |
TofPLpath | creates a list of HT matrices from a point list path | 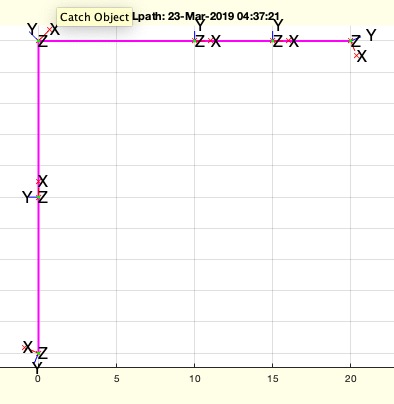 |
TofR | returns a HT matrix for an R matrix | 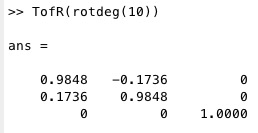 |
TofRd | creates a frame after rotation in distance d along new ex | 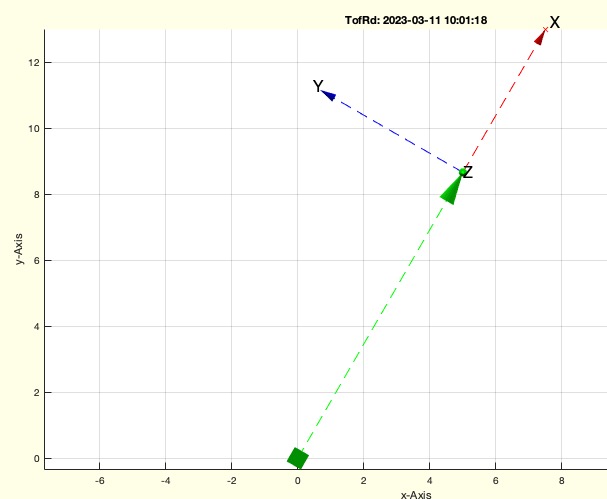 |
TofSGez | finds simple angle by ez vector using SGTsetBF | 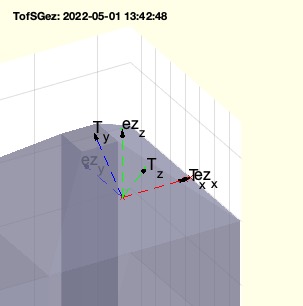 |
TofWheel | returns a HT matrix for a 2 wheel kinematic movement | 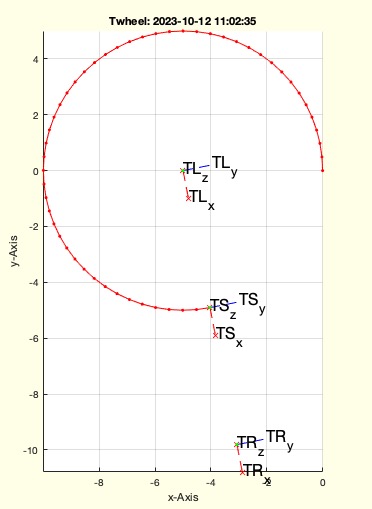 |
tplotangle | plot for a list of HT matrices the angle, angle velocity and angle acceleration | 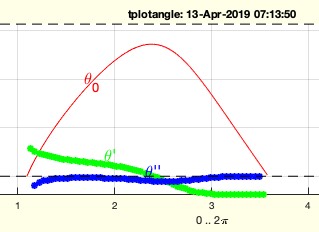 |
Trelation | creates a frame relative to another frame | 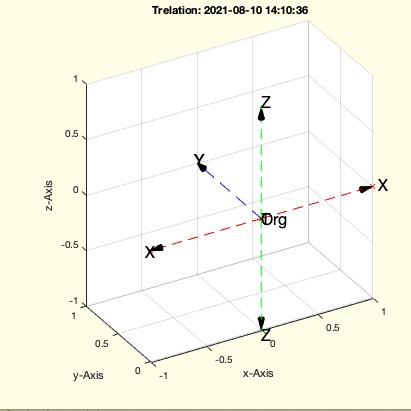 |
Trotate | returns a HT matrix rotated by | 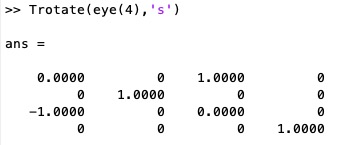 |
Tsvd | Correction fnct for an HT matrix for orthogonalizing a matrix after multiplication | 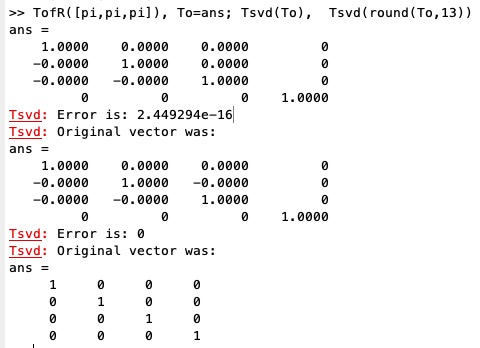 |
uniqueT | returns the difference between 2 4x4 HT matrices | 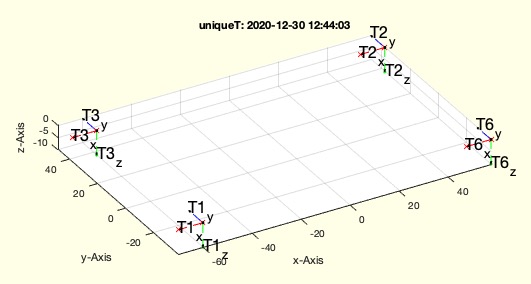 |
vecinterpolate | returns a vector row interpolation by | 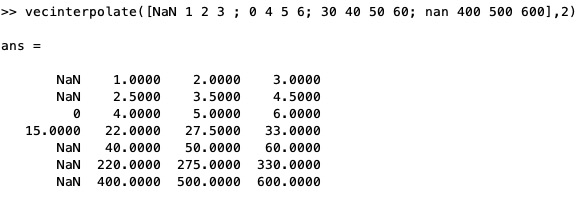 |
VLisbelowT | returns wether a list of points or a cell list of frames is under a frame | 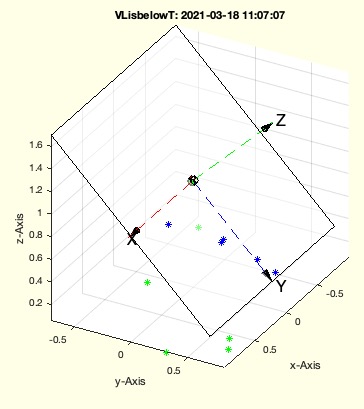 |
VLof2TR | returns a path with minimal number of axuiliary points to come from frame A to Frame B | 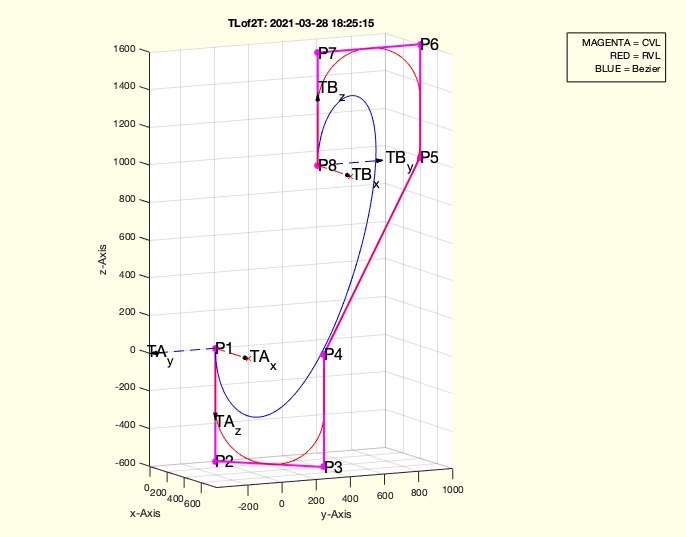 |
VLofT | returns the origin T(1:3,4) of a frame list | 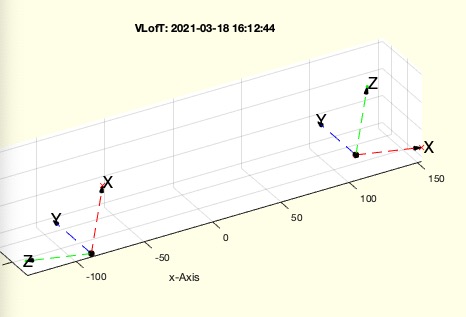 |
VLofTtoP | returns a list o fpoints that create a shortes path towards PB with radius R | 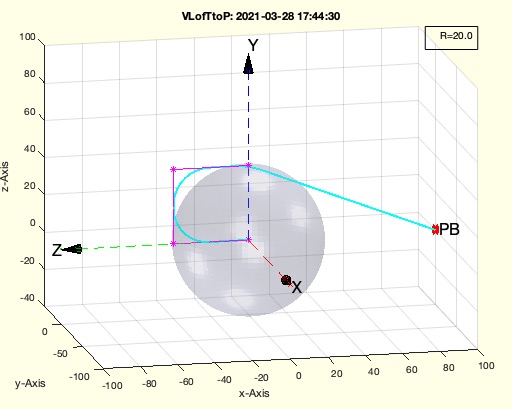 |
VLplotmotion | draws position, speed and acceleration of a VL | 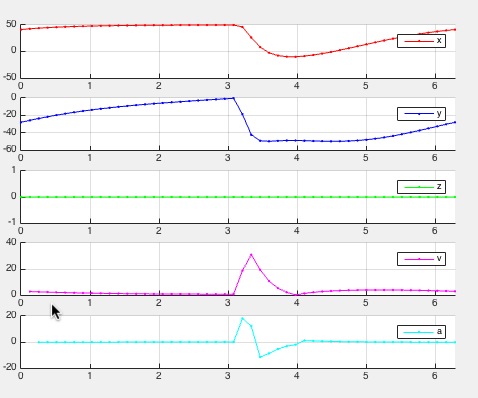 |
xyofez | returns for a simple ez vector the ex and ey orthonormal vectors | 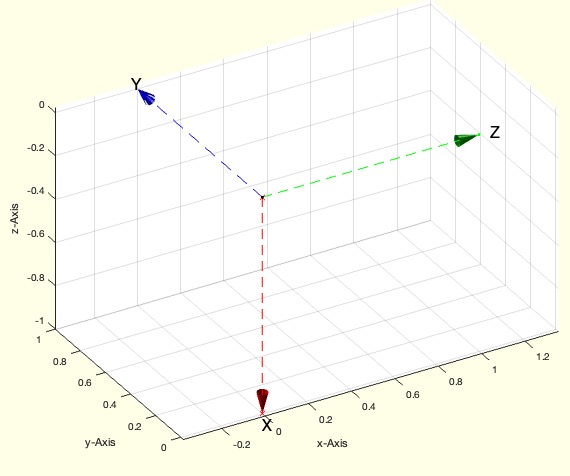 |