TofPLpath
by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Kinematics and Frames
Introduced first in SolidGeometry 4.5, Creation date: 2019-03-21, Last change: 2025-09-14
creates a list of HT matrices from a point list path
Description
2D Function x is in the direction of the path
TofPL creates the center of a cloud
TofPLpath creates a list HT matrices
See Also: radofT
, PLofT
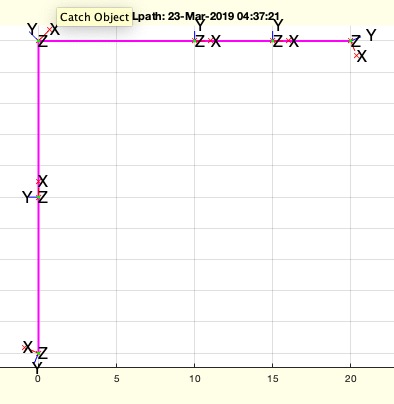
Example Illustration
Syntax
[T0,PS]=TofPLpath(PL)
Input Parameter
Output Parameter
T0: | | List of T2 homogenoues transformation matrices |
PS: | | pose list |
Examples
TofPLpath(PLsample(9))
Copyright 2019-2025 Tim C. Lueth. All rights reserved. The code is the property of Tim C. Lueth and may not be redistributed or modified without explicit written permission. This software may be used free of charge for academic research and teaching purposes only. Commercial use, redistribution, modification, or reverse engineering is strictly prohibited. Access to source code is restricted and granted only under specific agreements. For licensing inquiries or commercial use, please contact: Tim C. Lueth
Algorithm (Workflow)
This function, TofPLpath, is designed to create a list of homogeneous transformation matrices from a given point list path (PL). It is part of the SolidGeometry library and was introduced in version 4.5. The function is primarily used in kinematics and frames.
Input Parameters
- PL: A point list path, which is a series of points in 2D space that define a path.
Output Results
- T0: A list of T2 homogeneous transformation matrices. These matrices represent transformations in 2D space.
- PS: A structure containing pose information with fields A and B.
Algorithm Steps
- Assign the input point list path PL to variable A.
- Calculate the difference between each point and the next point in the list using
circshift to create a circular shift of the array. This difference is stored in DL.
- Normalize the differences in DL to get unit direction vectors, stored in EL.
- Average the normalized vectors with their circularly shifted counterparts to smooth the direction vectors.
- Calculate new points B by adding the averaged direction vectors EL to the original points A.
- Call the function
TofPose with A and B to compute the list of homogeneous transformation matrices T0.
- Store the original points A and the new points B in the structure PS.
- If no output arguments are specified, plot the point list path and the transformation matrices using
SGfigure, PLplot, and tplot.
Algorithm explaination created using ChatGPT on 2025-08-18 23:19. (Please note: No guarantee for the correctness of this explanation)
Last html export of this page out of FM database by TL: 2025-09-21