by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Kinematics and Frames
Introduced first in SolidGeometry 5.2, Creation date: 2022-04-10, Last change: 2025-09-15
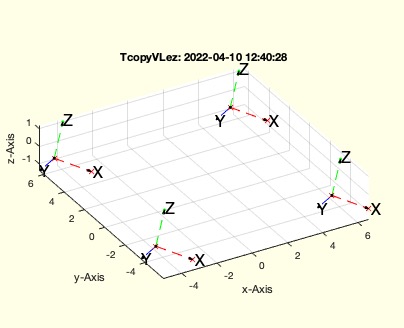
TL=TcopyVLez([VL,ez,wa,po,wo,TT])
VL: | Point list or vertex list | |
ez: | ez vector default is [0 0 1] | |
wa: | rotation around ez | |
po: | position offset that is added to each translation vector * (i-1); default is [0 0 0] | |
wo: | angle offset that is added to each translation vector * (i-1); default is 0 or [0 0 0] | |
TT: | Frame to transfer all resulting frames with; default is '' |
TL: | List of Frames |
PL=PLsquare(10)
TcopyVLez(PL) % Just points
TcopyVLez(PL,[0 0 1],pi/3) % All frames rotated
TcopyVLez(PL,[1 1 1]) % changed Orientation
TcopyVLez(PL,'','',[0 0 1]) % Increasing offset in z by 1
TcopyVLez(PL,'','','',pi/10) % Increasing offset angle rot ez
TcopyVLez(PL,'','','',[pi/20 pi/30 pi/10]) % Increasing offset angle rot xyz
TcopyVLez(PL,'','','',[pi/20 pi/30 pi/10]); TL=ans; SGcopyTL(SGbox(2),TL);
TcopyVLez(PL,'','','','',TofPez([0 0 10],[0 -1 0]))