TLofCVL
by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Analytical Geometry
Introduced first in SolidGeometry 4.2, Creation date: 2018-08-11, Last change: 2025-09-14
returns a list of frames that connect a start frame and an end frame along a spatial contour
Description
For planar curves and conoturs think also about using TLofPL (but ez has to be rotated)
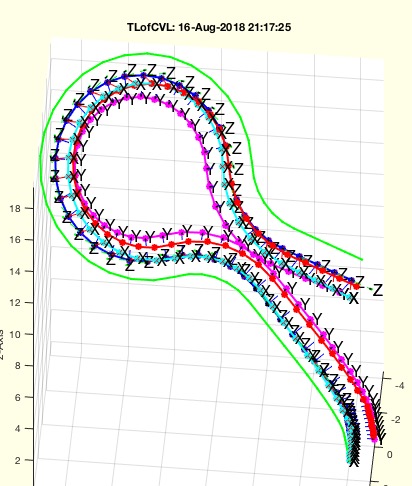
This function creates a list of HT frames for a vertex list, a start frame and an end frame as well as a radius specification with which a transition between start and end frames can be achieved. First, VLradialEdges2T adds radii to the contour in order to avoid strong curvature changes. The rotation by ez remains between the Start Frame and the End Frame. For this purpose support points are inserted on long straight lines. Then the necessary rotation error between the start frame and the end frame is determined in relation to the broken curve surface normal (VLedgeNormal). The required rotatation is equally distributed between start and end points
See Also: TLofPL
, SGofCPLtransT
, VLradialEdges2T
, VLedgeNormal
Example Illustration
Syntax
Ti=TLofCVL([OVL,R,T1,T2,typ,tor,aux])
Input Parameter
OVL: | | Open Path to follow in 3D |
R: | | Radius; default is 2 |
T1: | | Start Frame |
T2: | | End Frame |
typ: | | type 'rad', 'rmax', 'tan'; default is 'rad'; see VLradialEdges2T |
tor: | | true=>torsion; false=>no torsion; default is true |
aux: | | distance of axiliary points; default is R/3 |
Output Parameter
Ti: | | List of HT-Matrixes (4 x 4 x n] for n vertices |
Examples
TLofCVL(VLsample(7),2,eye(3),rot(0,0,pi/2),'rad');TL=ans;
TLofCVL(VLsample(7),2,eye(3),rot(0,0,pi/2),'rmax');TL=ans;
TLofCVL(VLsample(7),2,eye(3),rot(0,0,pi/2),'tan');TL=ans;
TLofCVL(VLsample(3),2,eye(3),rot(0,0,pi/2),'tan',true);TL=ans;
TLofCVL(VLsample(3),2,eye(3),rot(0,0,pi/2),'tan',false);TL=ans;
TLofCVL(VLsample(3),2,eye(3),rot(0,0,pi/2),'tan',false,inf);TL=ans; % No auxiliary points
TLofCVL(VLsample(3),2,eye(3),rot(0,0,pi/2),'tan',false,inf);TL=ans; % No radial solution points
Copyright 2018-2025 Tim C. Lueth. All rights reserved. The code is the property of Tim C. Lueth and may not be redistributed or modified without explicit written permission. This software may be used free of charge for academic research and teaching purposes only. Commercial use, redistribution, modification, or reverse engineering is strictly prohibited. Access to source code is restricted and granted only under specific agreements. For licensing inquiries or commercial use, please contact: Tim C. Lueth
Last html export of this page out of FM database by TL: 2025-09-21