acos2 | 2D fnct: returns the angle between two vectors including sign | 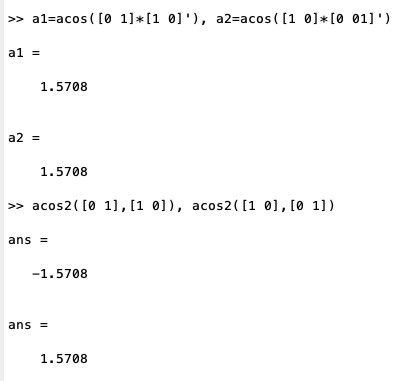 |
angleintersect | intersect two angle areas | 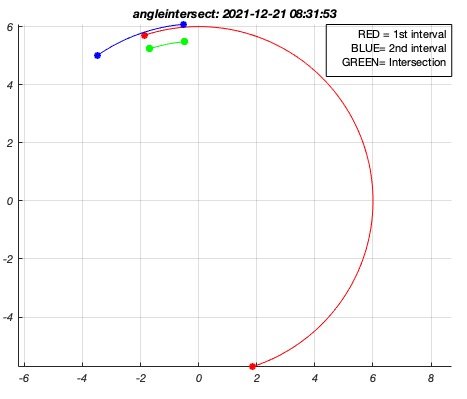 |
angleinterv | shifts an angle intervall table vainto a fixed interval such as [-pi..+pi] or [0 2*pi] | 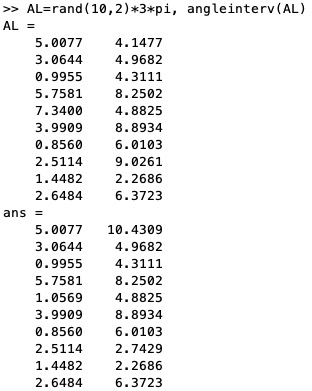 |
angleshift | shifts an agle value into a fixed interval such as [-pi..+pi] or [0 2*pi] | 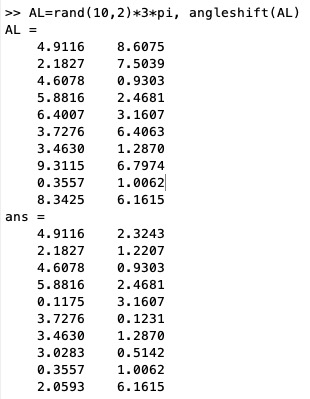 |
aplot | draws an angle relative to a center and two vectors | 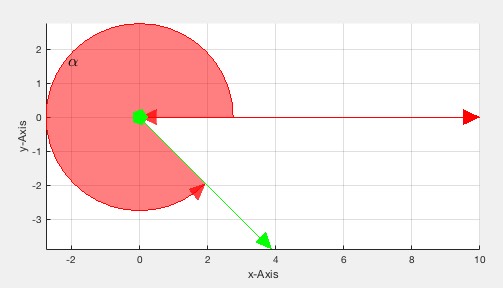 |
barycartNT | returns the vertex list (3D) of a point list (2D) relative to one facet |  |
barytocartUVL | converts a 2d Barycentric [u,v] vertex list into a 3D Cartesian coordinate list [x, y, z] | 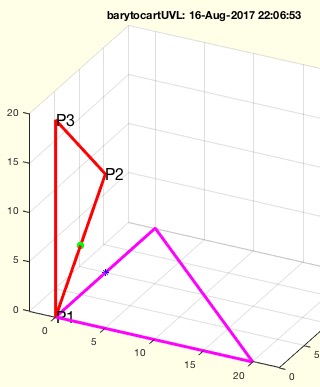 |
barytocartUVLdelaunay | converts a 2d Barycentric [u,v] vertex list into a 3D Cartesian coordinate list [x, y, z] | 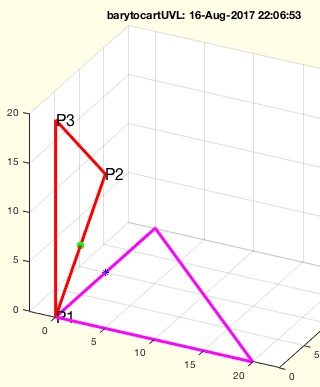 |
cartbaryNT | returns the 2D barycentric coordiantes of a VL relative to one facet | 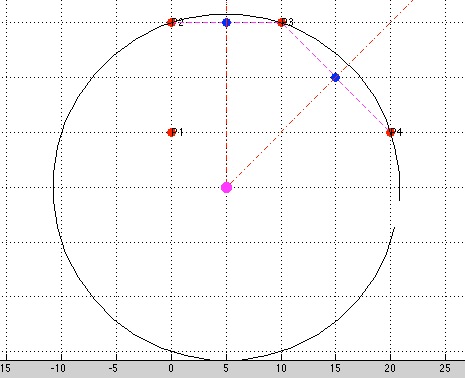 |
carttobaryVL | converts a 3D planar vertex list into a 2D barycentric coordinate list [u,v] | 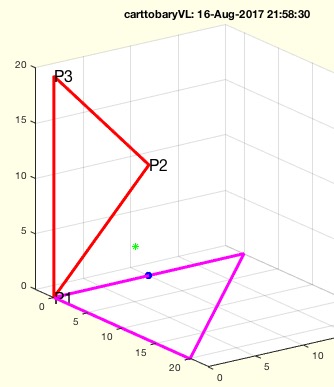 |
center3P | Center line of a cylinder given by 3 points | 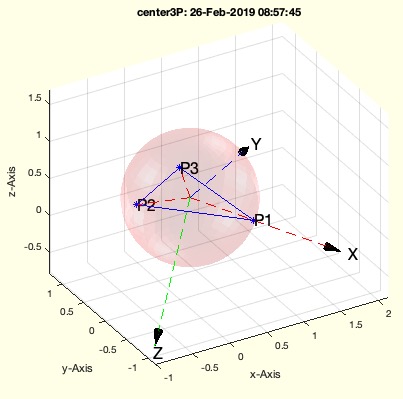 |
center4P | Center and diameter of a sphere given by 4 points | 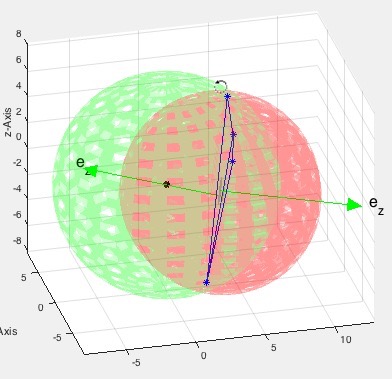 |
centerPL | returns the mean of the convex hull of the point list | 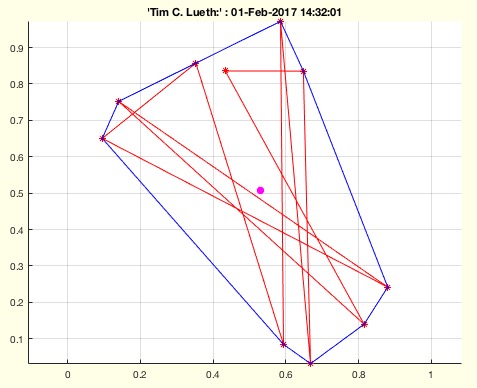 |
centerVL | returns the center and distance indices of a vertex list |  |
circ2poly | ratio of polygon radius between if turned pi/n radiands | 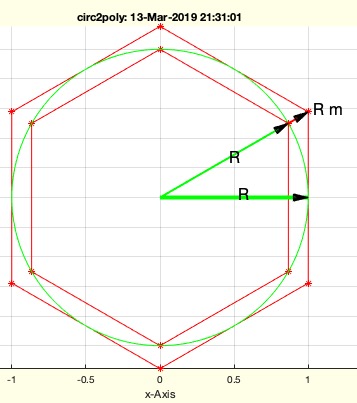 |
circlesegmentofPL | returns the angle intervall of a contour PL from a view point A0. | 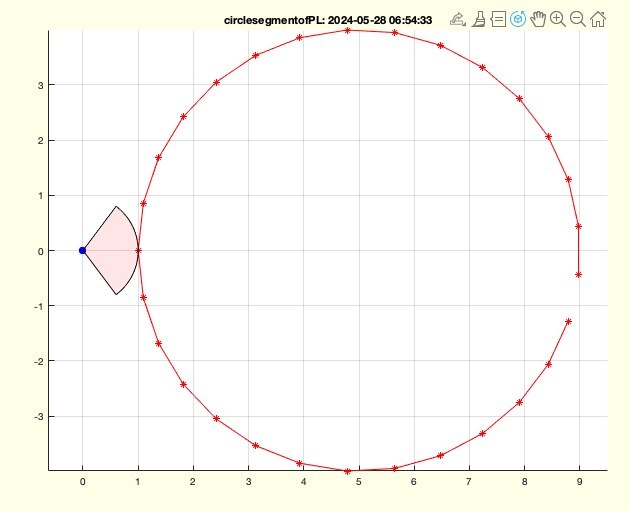 |
corner2rad | returns the radius based on the distance to the two tangets | 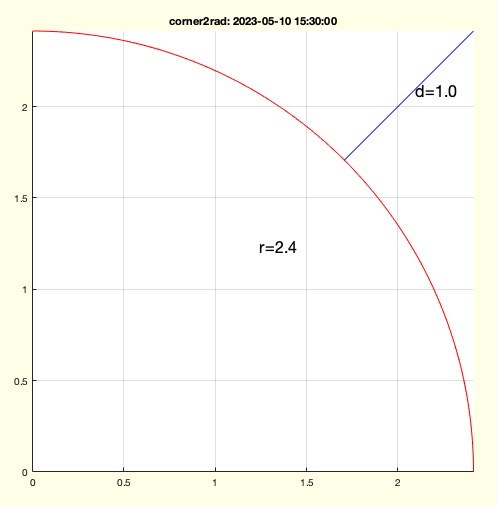 |
CPLisccw | returns index list for CPL direction | 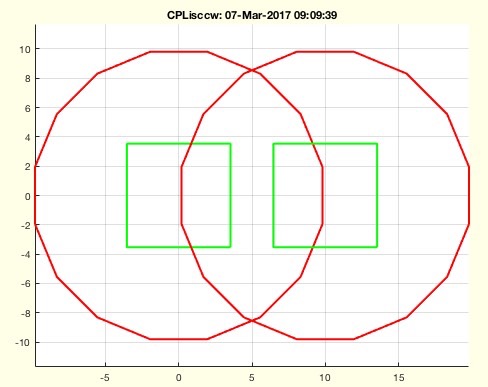 |
CPLrecontour | returns a contour list for a sliced/cutted object | 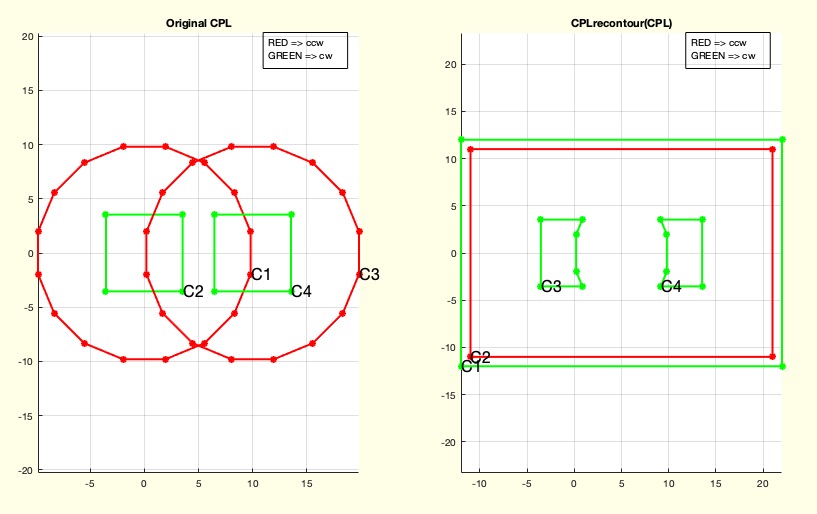 |
cross2circ | returns the crossing points of two circles | 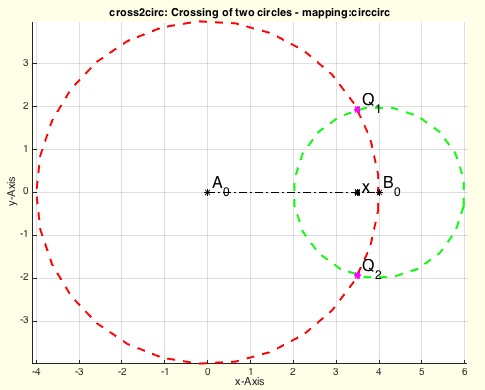 |
cross2edges | calculates in 2D the crossing point of two straight lines |  |
cross2edges2 | calculates in 2D the crossing point of two straight lines |  |
cross2L | returns the crossing point of two straight lines | 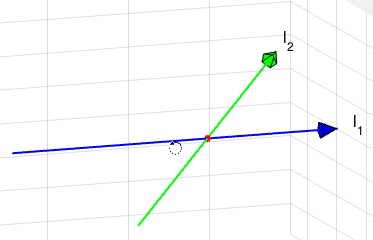 |
cross2T | returns 3 crossing points of plane T1 with the plane T2 | 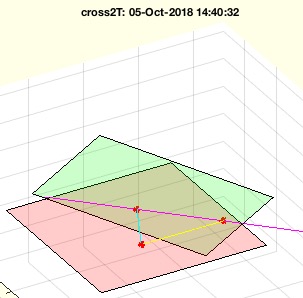 |
cross4P | return whether two lines cross each other (2D fnct) |  |
crosscircline | returns the cross points of a circle and a straight line | 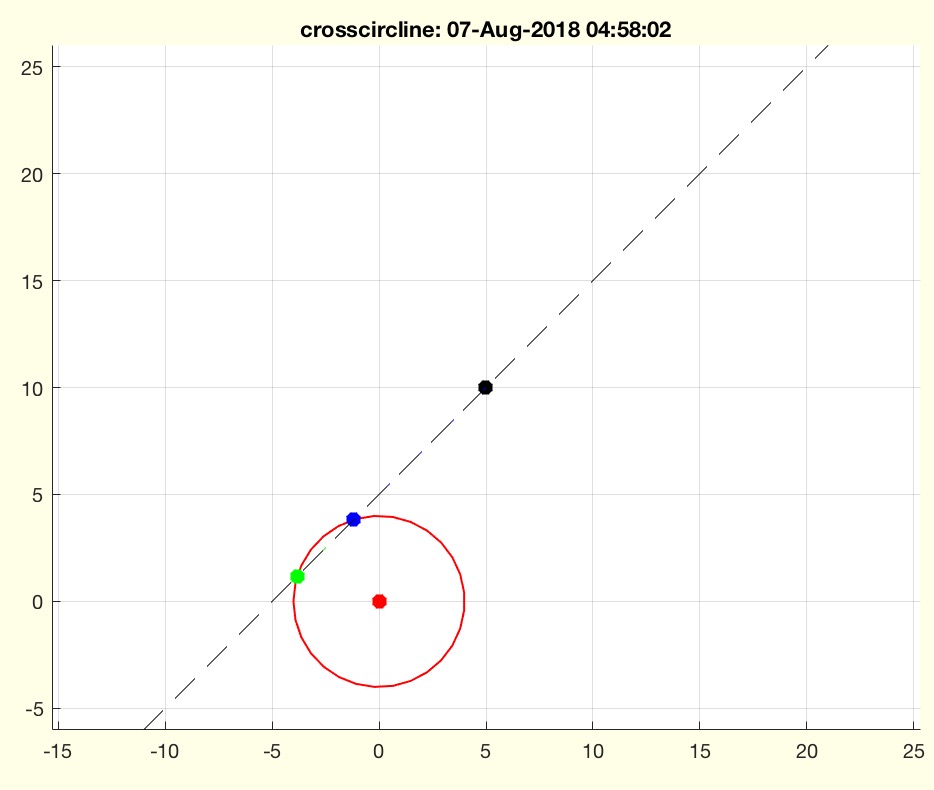 |
crossL | returns the crossing points of a stright line with the main planes where z=0, x=0 or y=0 | 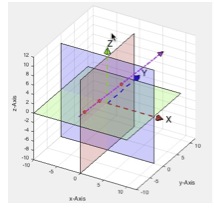 |
crossT | returns 3 crossing points of a plane TE with the x/y-plane (z=0) | 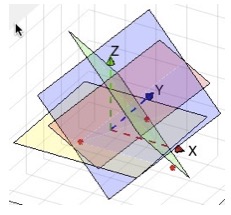 |
crosstest | return whether a straight line right from point a crosses a line between pa and pb | 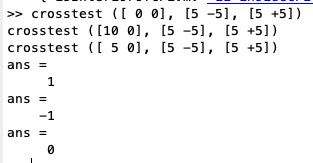 |
crosstest2 | return whether a straight line right from point a crosses a line between pa and pb | 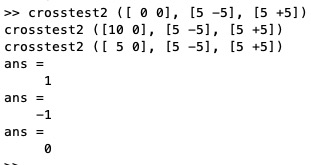 |
crossz | calculates in 2D only the z-part of the cross product and handles values near zero | 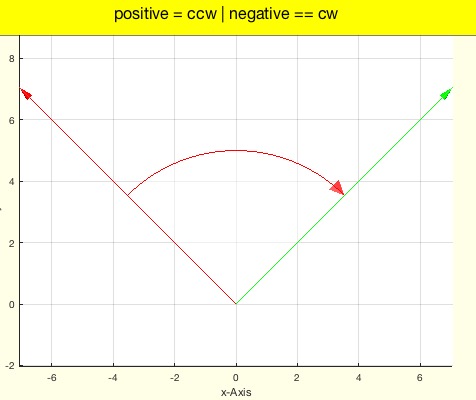 |
CVLremstraight | returns straight points on a line depending on distance and agle | 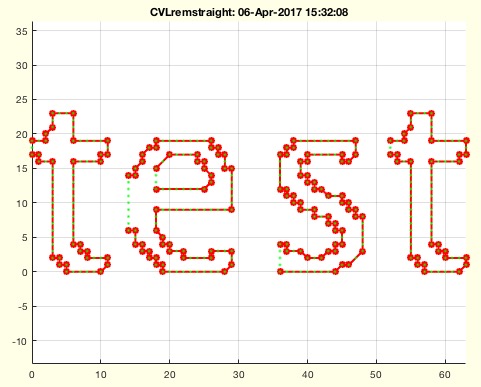 |
diffTincz | returns for Frames the relative incliniation of the ez vector of B wrt to A | 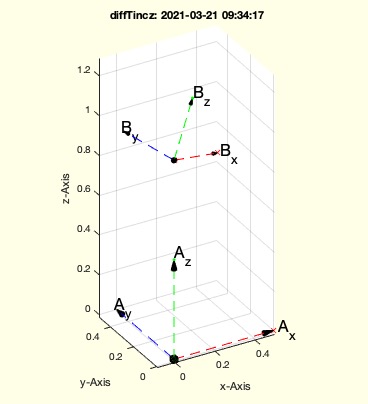 |
diffTrotz | returns for Frames the relative rotation of the ez vector of B wrt to A | 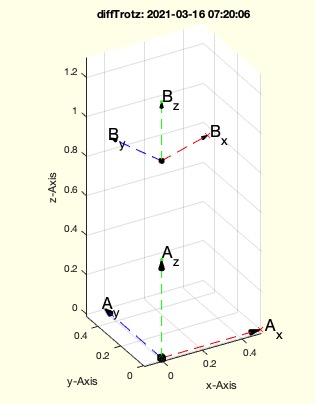 |
dist2line | mirrors a point at a straight line in 2D | 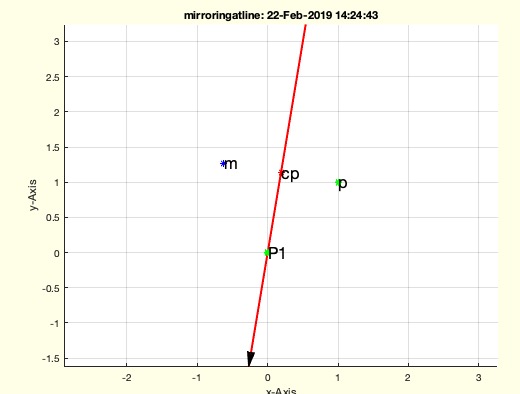 |
distE | returns shortest distance to x/y plane and normal vector to p | 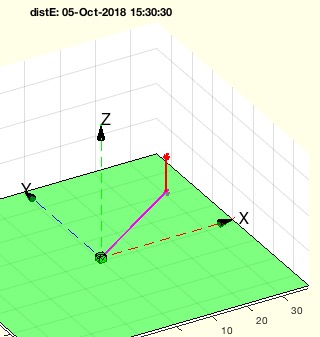 |
distT | returns orthogonal vector and normal vector to T-plane | 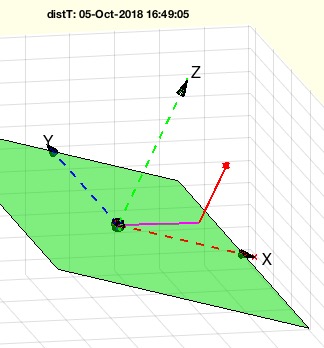 |
dofn | returns the radius relation between a radius and a n-polygon | 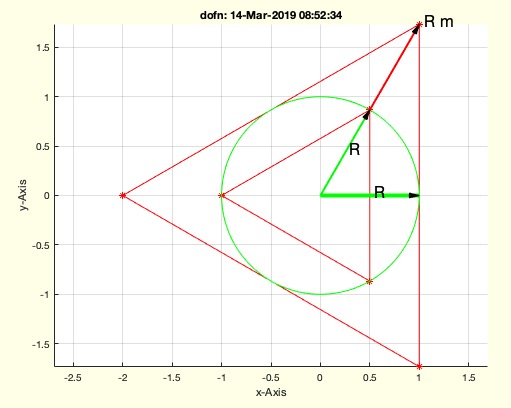 |
dofRintrusion | provides the minimum intrusion distance to fully insert a cylinder into a sphere | 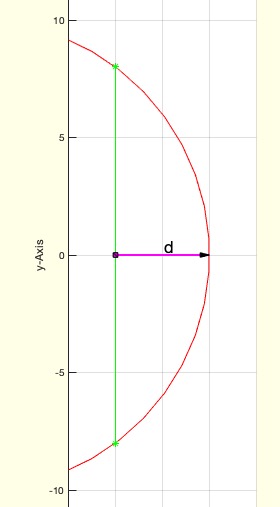 |
ELdirectVLEL | returns a edge list, in which all contours have the same direction than the first contour in the edge list |  |
ezof3P | returns ez and R for 3 Point Rotation Matrix | 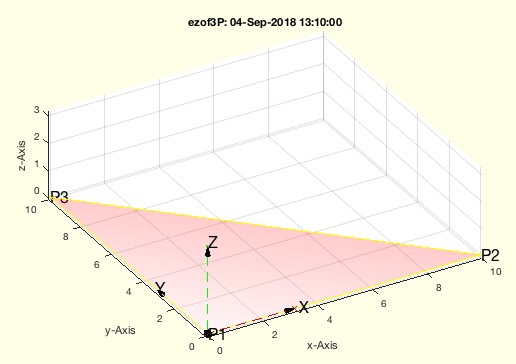 |
getprojectionimage | returns a single projection image of gca |  |
hesseplaneofT | Hessennormalform of T's xy plane | 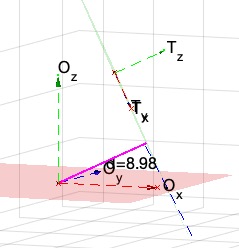 |
imageofVLprojection | returns an image of a VL projection using the matlab camera view concept | 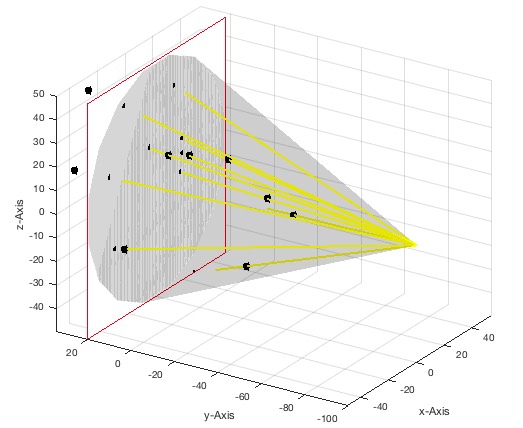 |
insidePLELdelaunay | returns whether a point is inside/outside a contour |  |
intersectstriangle | fundamental fnct for the intersection between a ray and a triangle | 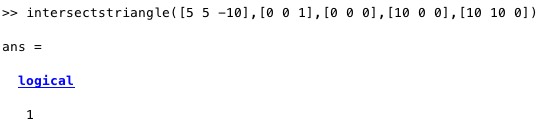 |
intersectstriangle46 | fundamental fnct for the intersection between a ray and a triangle | 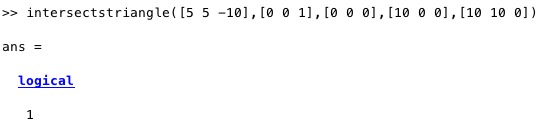 |
isincirclesegment | returns whether an angle or a angle list is inside an angle interval | 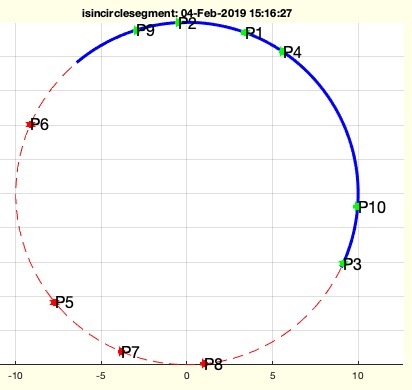 |
isintriangle2 | returns whether a point is in a triangle |  |
isrealr | returns whether all elements on a row are real | 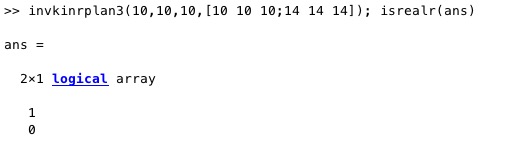 |
issameside | return whether 2 points p1,p2 are on the same side of a line through A to B |  |
KDWofXY | returns two line distances of points and an angle and a displacement of a straigt line line from two points | 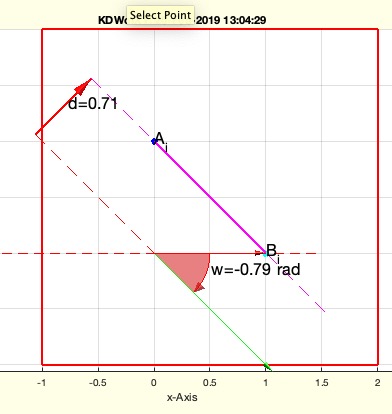 |
lengthC | returns length and maximum of changing angle plus |  |
mirroringatline | mirrors a point at a straight line in 2D | 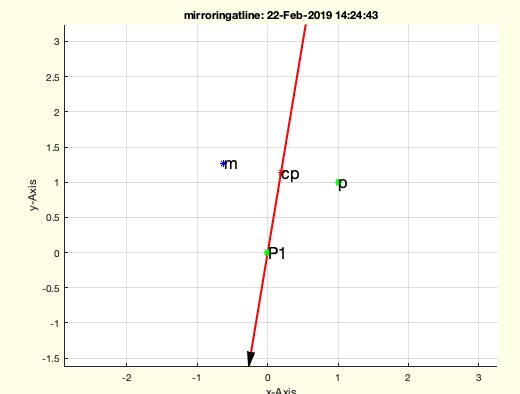 |
mirroringatline3D | mirrors a point at a straight line in 3D | 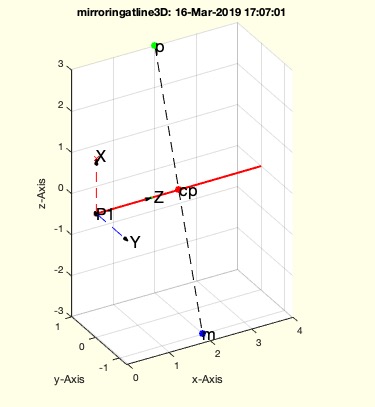 |
nearestcluster | returns a reduced list of points and a cluster list | 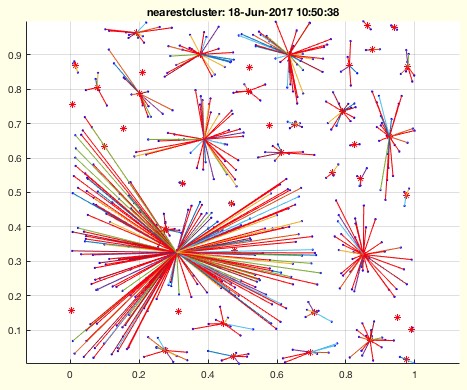 |
nearestpair | returns the nearest point pairs of two vector list | 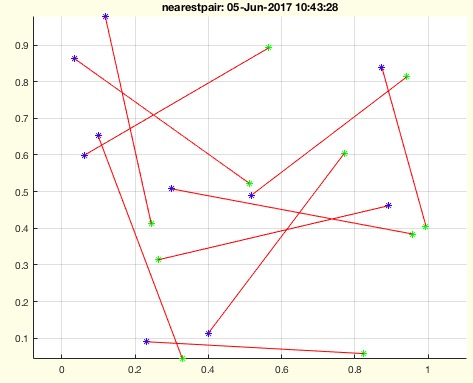 |
NLconformance | changes the orientation of a list of normal vectors | 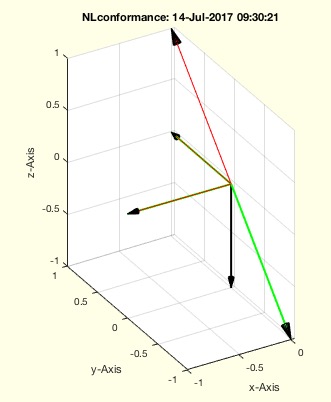 |
NLcontourVL | return the list of normal vector for the edges between the vertices and the vertices between the edges |  |
nofrd | returns the minimum number of edges to guarante a slot distance between a peg and a hole | 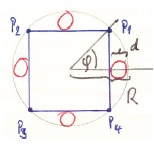 |
phiofsr | returns a angle difference to achieve a slot size |  |
planedistanceofT | returns the distance of a vertex list to a plane in HT coordinate form | 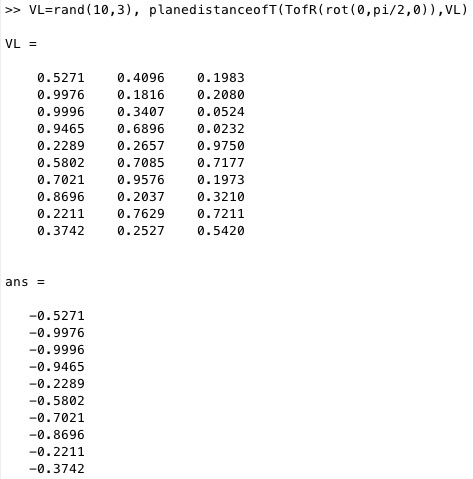 |
planeparamofT | returns the plane parameters from a HT matrix (x/y plane) - ax+by+cz+d=0 | 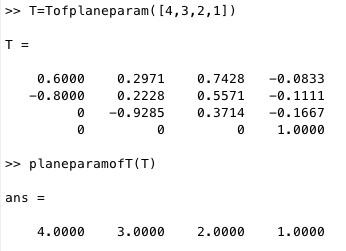 |
PLcircle | returns a 2D point list of a circle or circle segment | 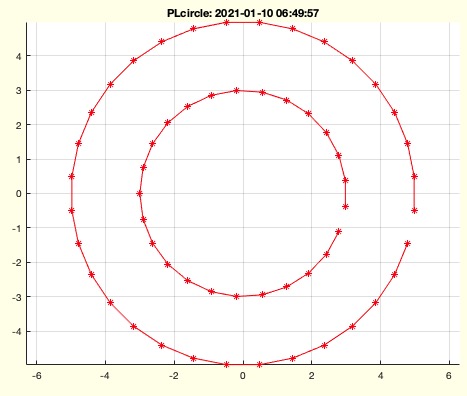 |
PLevolvente | returns the point list of an evolvente curve | 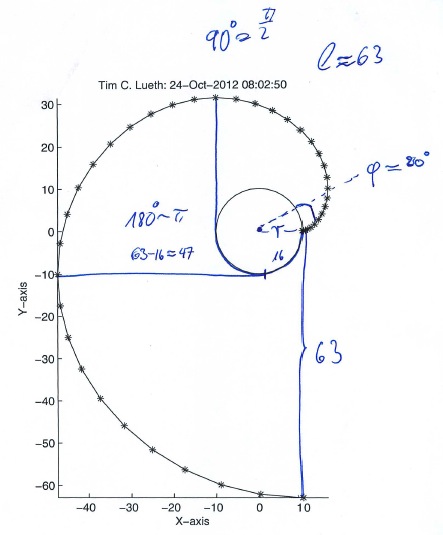 |
PLFLfaceNormal | returns the rounded (1e-5) length of the area size/length of normal vector |  |
PLFLofCPLdelaunay | Returns 2D point list and facet list of a triangulated contour | 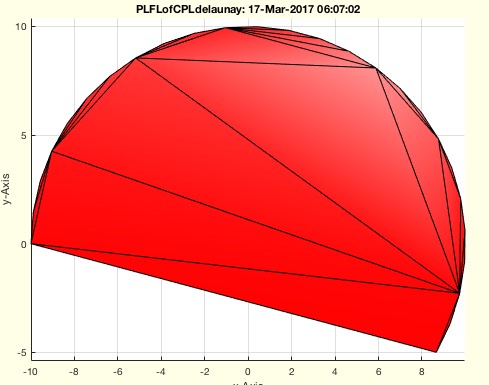 |
PLFLofCPLpoly | Utilizes the poly2fv fnct for VLFL-LIb | 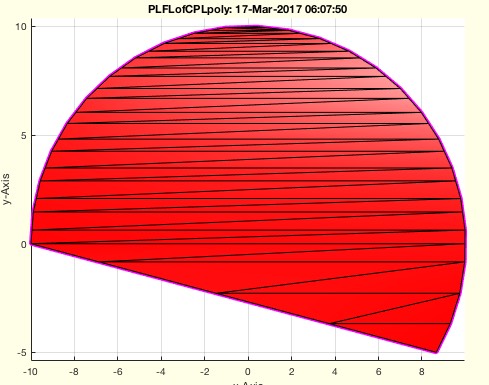 |
PLnorm | returns a normalize vector list nx2 |  |
plotT | plots a coordinate system given as HT matrix |  |
projectionimage | returns a central projection image by using Matlabs view commands | 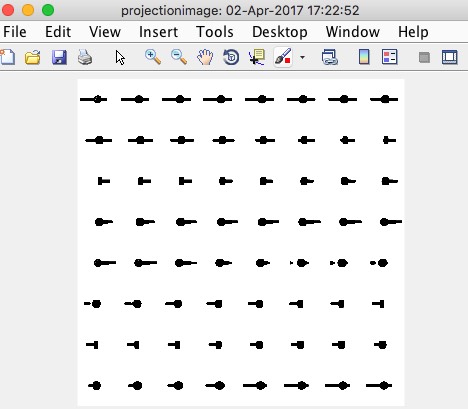 |
RL2exl | returns X vectors for a list of euler angles |  |
RLcurvature | returns a circular bended closed contour |  |
RLofEulerInterpolation | Returns euler rotations as linear interpolation |  |
RLplot | plots along the z axis the systems of a Euler Rotation List |  |
rofcircbend | returns bending radius and angle for a compressed line |  |
Rofez | returns a rotation matrix based on a list of ez vector | 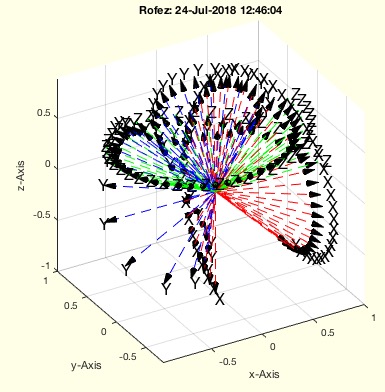 |
Rofrdintrusion | provides the minimum intrusion distance to fully insert a cylinder into a sphere | 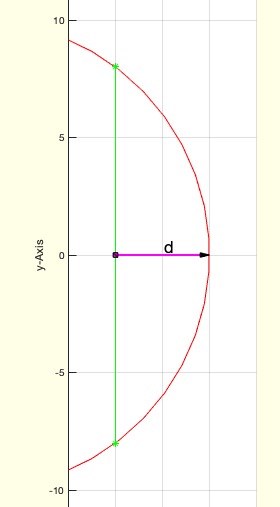 |
rofRintrusion | provides the minimum intrusion distance to fully insert a cylinder into a sphere | 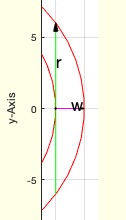 |
Rofxy | Rotation matrix by the ez vektor and and optional rotation angle | 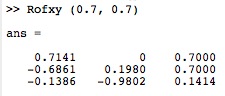 |
rot | returns rotation matrix in 3x3 as Rx*Ry*Rz or 2x2 Rz | 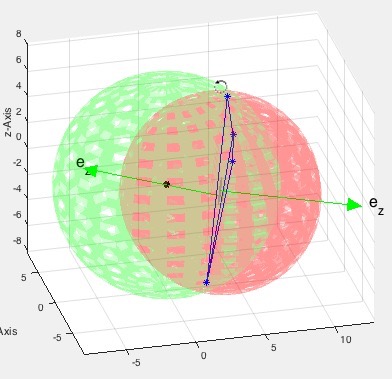 |
rotdeg | returns 3x3 rotation matrix for Deg angles in x, y, z |  |
RPofTrelT | returns the frame T2 in relation to frame T1 | 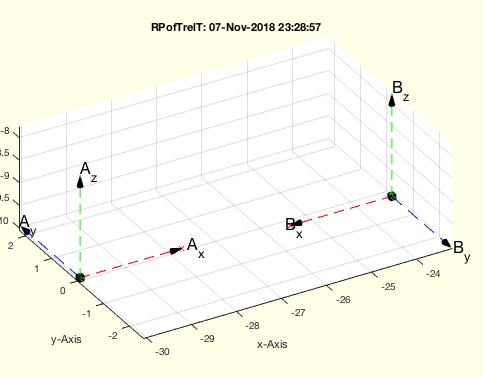 |
screw2R | definition of a screw coordinate system | 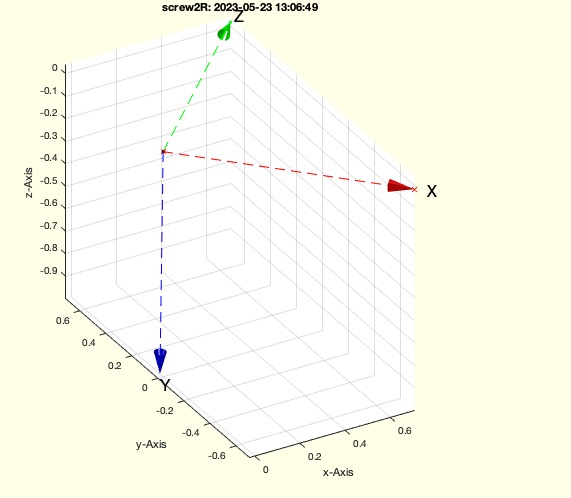 |
setgcapixelsize | sets the current gca to a default pixelsize |  |
SGClayout | returns a modified arranged solid table | 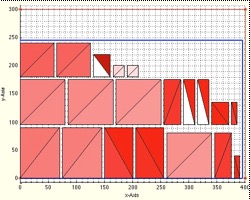 |
SGcutTbladeangle | returns the mean center angle of the cutting blades | 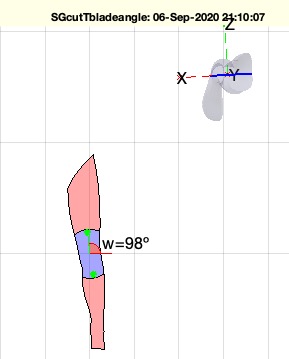 |
SGgetCenterPoint | returns a point in the center of all vertices |  |
SGmagnifyVL | magnifies/shrinks the dimensions of the vertex list | 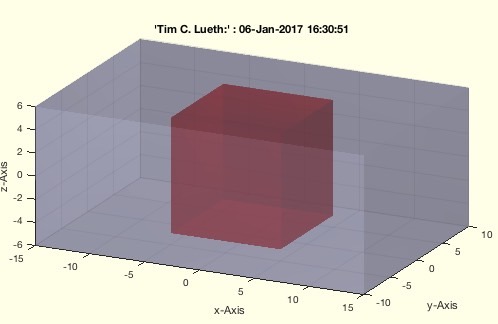 |
SGmirrorD | Mirrors a solid in a distance to the maximal dimension in the specified direction | 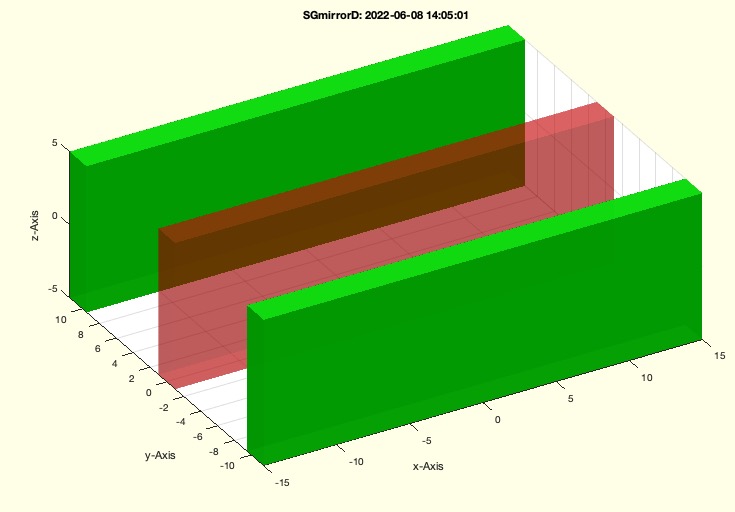 |
SGrotate4print | rotates an object to achieve as long as possible lines on the floot | 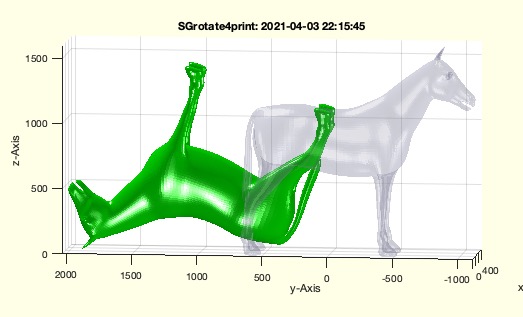 |
SGsurfacedistance | calculates the shift distance from a solid to the surface of another solid | 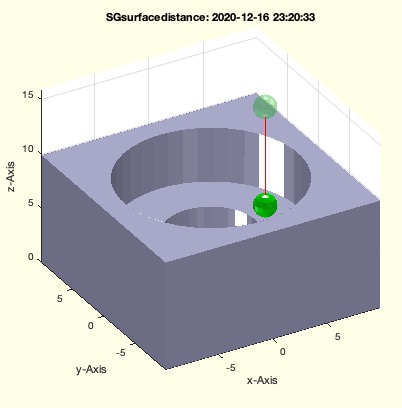 |
SGvolume | returns the estimated volume of a solid |  |
sizePLFL | returns the index of facets with area > 0 |  |
sofrd | returns the minimal auxiliary point distance on a circular curved contour |  |
tangent2circ | returns outer and inner tangents of 2 circles | 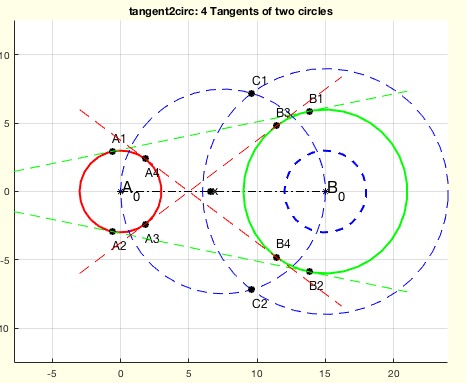 |
tangente | returns the point for a tangente |  |
tangentRP | returns the two tangential points of a circle | 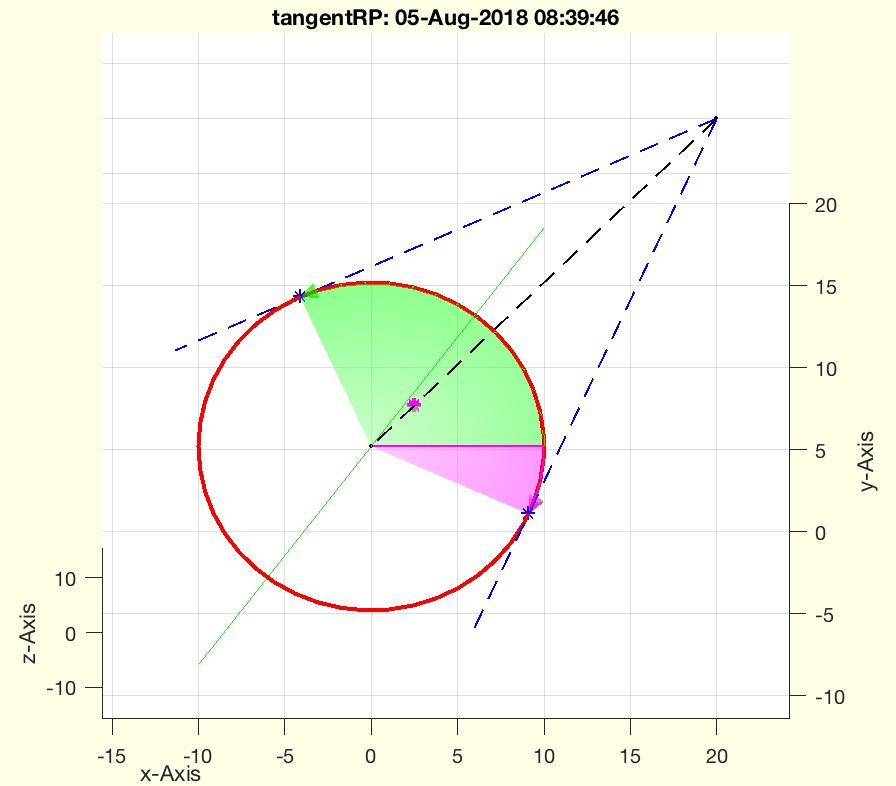 |
Tcross2T | returns the crossing line HT of two defined planes T1 and T2 |  |
textP | draws a texlabel text at the position |  |
textT | drawn a text at the position of a HT matrix |  |
TflipR | turns the current right hand system into an inverted left hand system | 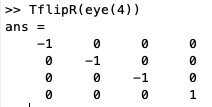 |
tfplot | plots an HT matrix including the x/y plane | 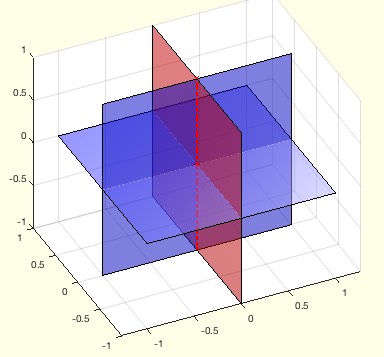 |
THLof2F | returns Tetrahedron list of two facets | 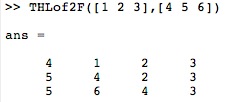 |
TLofCVL | returns a list of frames that connect a start frame and an end frame along a spatial contour | 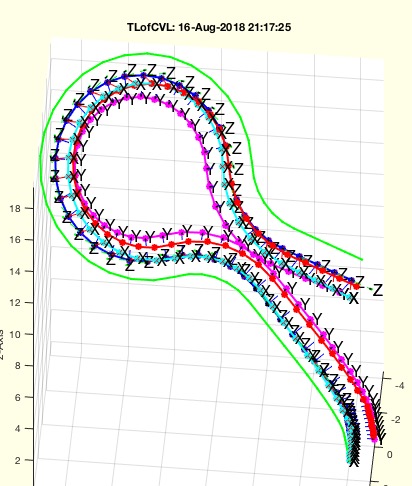 |
Tof2vec | returns transformation matrix based on the 2 point movements | 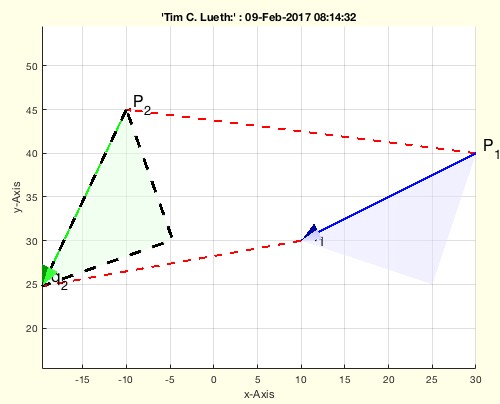 |
TofcamVLPL | returns the coordinate system and calibration matrix of a camera | 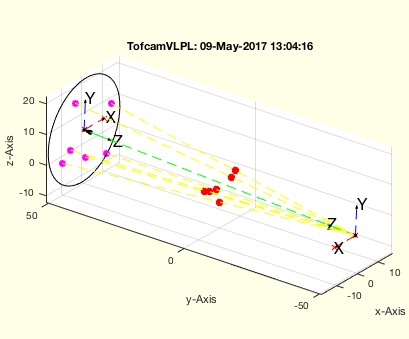 |
TofDPhiH | returns a 4x4 transformation matrix |  |
Tofgca | returns the HT matrix of the current camera position | 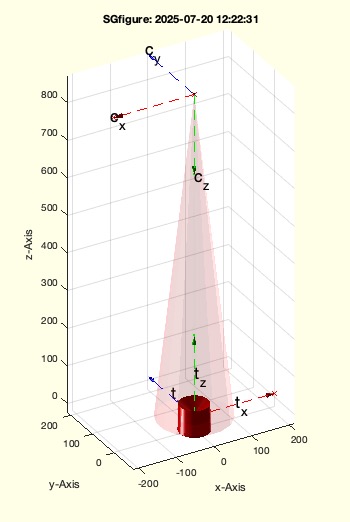 |
Tofhesseplane | returns an HT amtrix from a hesse normal form of a plane | 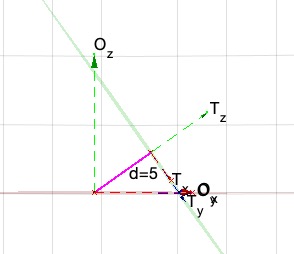 |
TofP | returns a T matrix from a point in 2D or 3D | 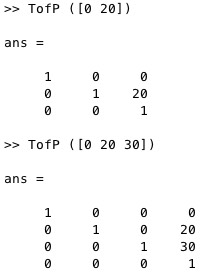 |
TofPcam | returns a transformation matrix using a vertex and a the current camera view |  |
TofPEul | return from euler angle and position an HT matrix |  |
TofPez | creates a T matrix from point and ez-Vector |  |
TofSG | sets a HT matrix relativ to nested solid |  |
TofSGML | returns HT for a mounting face with known number |  |
TofSGMLez | returns HT for a mounting face with known ez |  |
TofT | returns a T matrix defined relative to another T matrix |  |
TofTrel | creates a HT matrix relative to a frame | 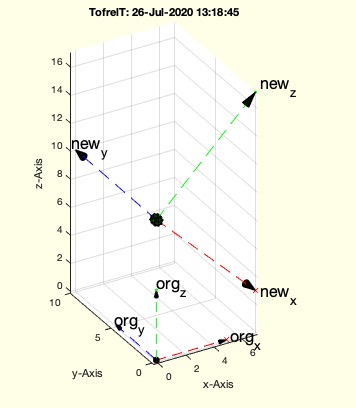 |
TofVL | returns the main axis of a vertex list or SG | 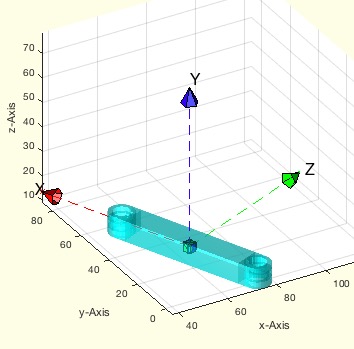 |
TPL | return for vertices of a patch the HT Matrix of the patch center | 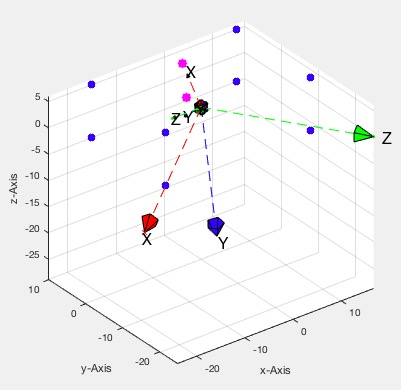 |
TplanesofPCnormals | returns the HT matrices for the points and normals | 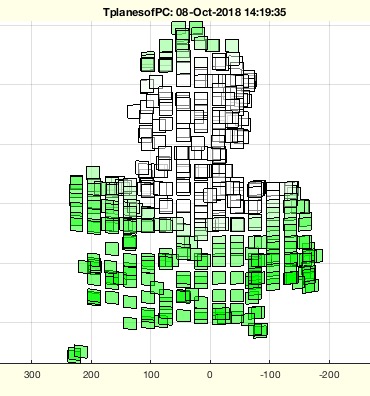 |
TplanesofVLFLfacets | returns the HT matrices for the facets from center and normal | 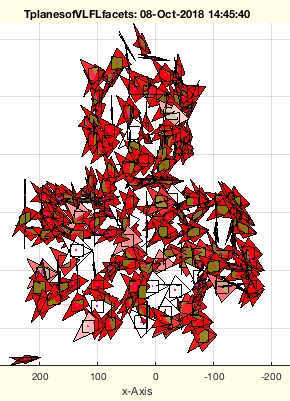 |
tplot | plots a coordinate system given as HT matrix |  |
TregisterConvexHull | returns the registration matrix based on the convex hull of the vertices |  |
Txy | returns a matrix for a point p and pitch-yaw values of ez |  |
vec2number | converst a vector row into a number for vector elemetns of 1 to 9 |  |
vec2ortho | creates the orthogonal vectors for a 2D vector list |  |
vecnormr | returns for a vector list (rows) the vectnorm result |  |
VLBezier4P | simple fnct to calculate a 3D Bezier curve |  |
VLBezierC | returns a Bezier curve for a given list of points |  |
VLcross2Lines3D | returns the crossing point of 2 lines in [x y z] | 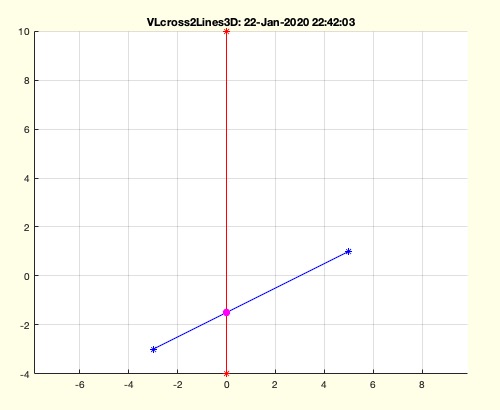 |
VLcrossstraightnline3D | returns the crossing point of 2 lines in [x y z] | 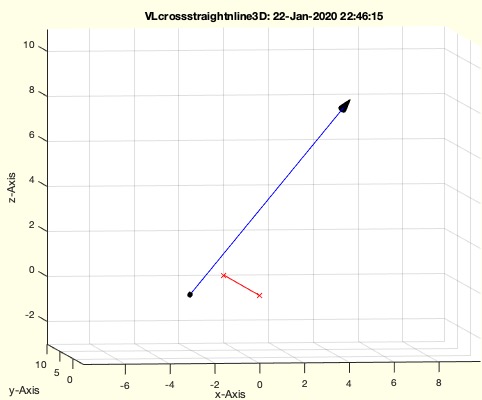 |
VLdistance | returns a distance list - but is different from VLnorm | 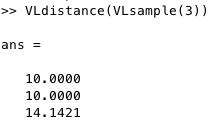 |
VLFLfaceNormal | returns the normal vector (or NAN) of the facet list and cutted (1e-4) length | 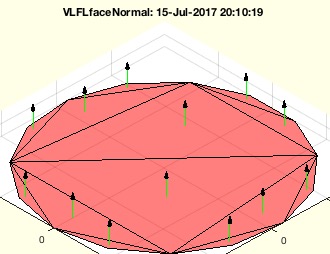 |
VLFLmeshdensity | decreases the edge length of the facets for deformation use |  |
VLFLrotsymRLELn | returns VL and FL for a torus style solid |  |
VLFLspherecurvedCL | returns VL and FL for a sphere curved surface given by a 2D contour point list |  |
VLFLspherecurvedGPL | returns a sphere curved (3D) contoured surface grid (2D) |  |
VLFLvertexNormal | returns the vertex normal for the vertices of a solid |  |
VLGraham | returns the convex hull of a point list by Graham (outdated) | 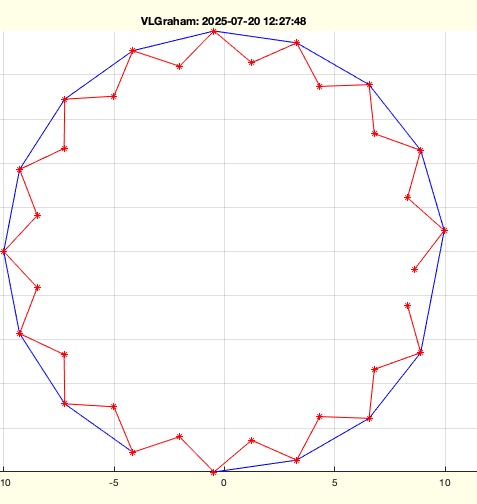 |
VLGrahamPVL | returns the convex hull for a given set of vertices that are in a plane | 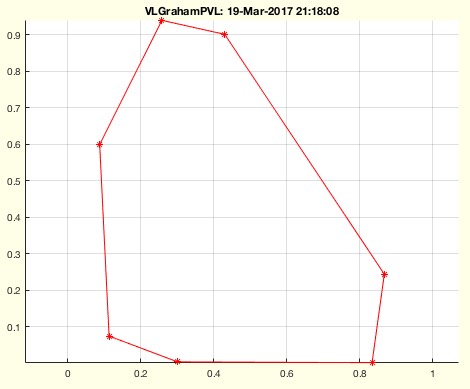 |
VLinsertEulerSteps | inserts vertex points on straight lines if the twist angle is to large | 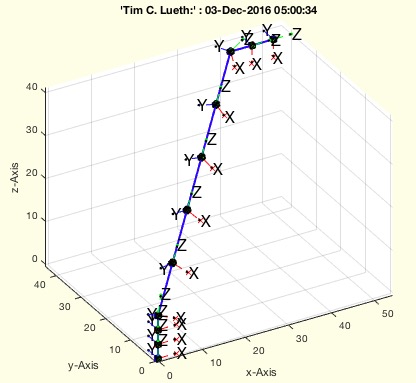 |
VLmindist | returns the minimal distance larger than zero | 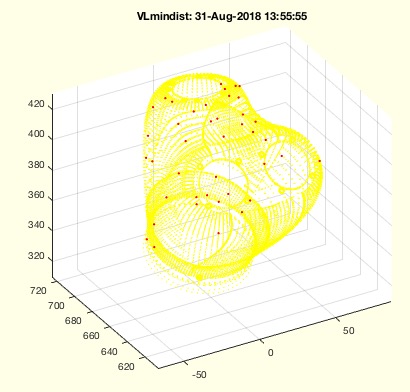 |
VLmindxyz | returns the minimal distance larger than zero | 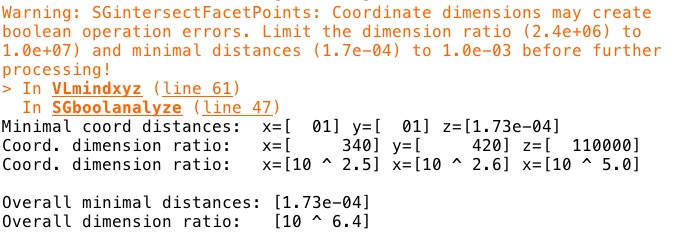 |
VLmostdistanceNeighborN | return a list of n points ou of a points list that have the maximum distance sum | 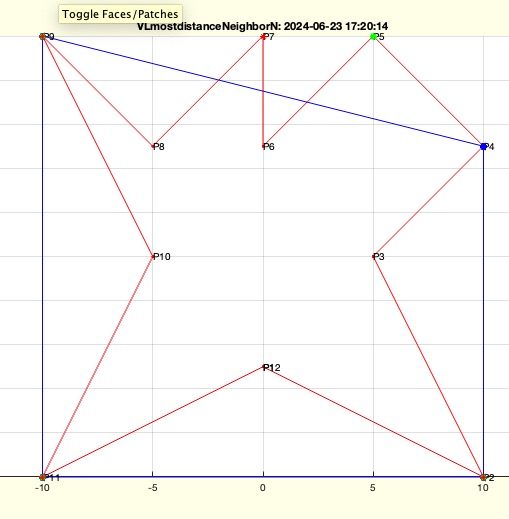 |
VLnearestNeighborN | returns the N nearest Neighbors between two point lists | 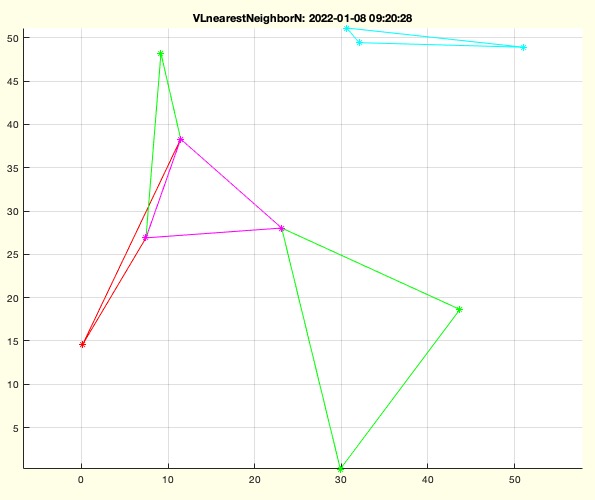 |
VLNLplot | plots a normal vector list at a vertex list | 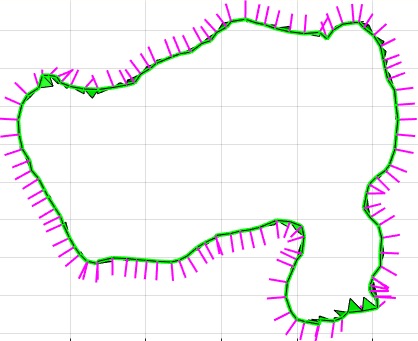 |
VLofimsegthres | returns a VL of segmented points within an image | 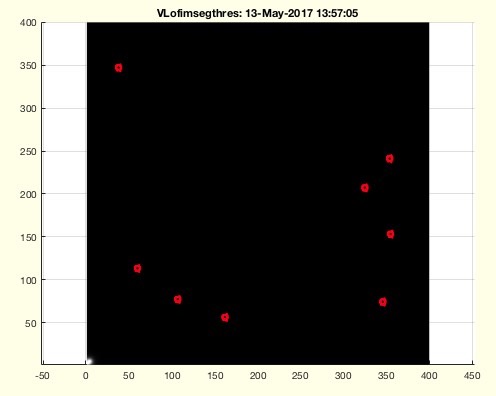 |
VLplaneprojection | returns a PL as projection of a vertex list to a orthogal plane defined by an ez vector | 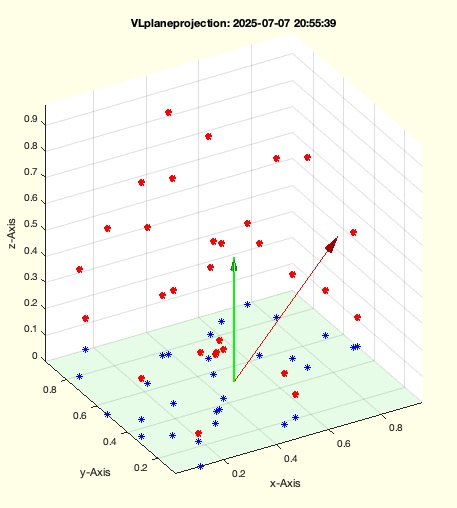 |
VLprojection2SG | projects a Vertex list in parallel projection to a solid | 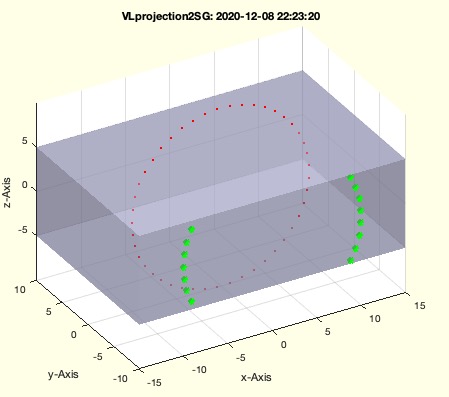 |
VLRadius4P | returns a contour based on 4 points similar to VLBezier4P | 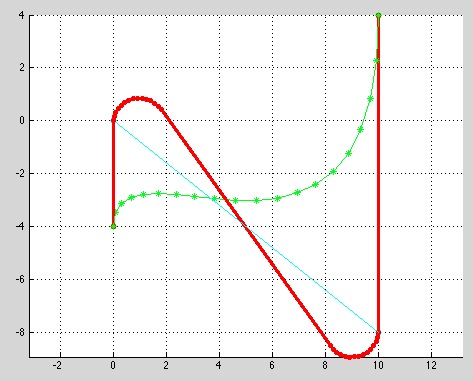 |
VLseparate | wish to solve boolean opeartion problems | 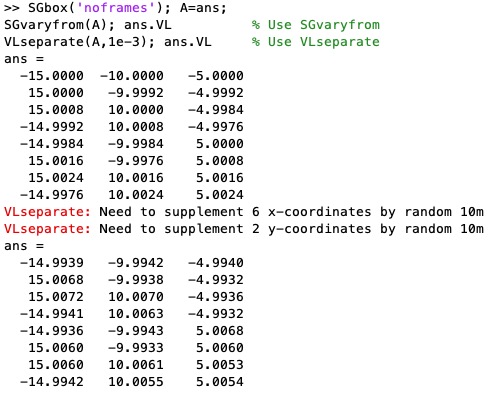 |
VLtangentcirc | creates a vertex list for a tangential circle segment |  |
wofcross2circ | just returns the angles of the two crosspoints | 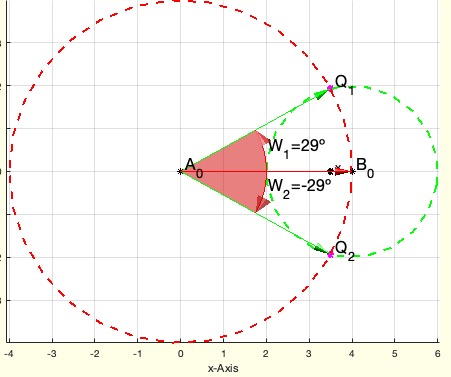 |
wofT | returns simply the squeezed atan2 of the rotation matrix of T |  |
zigzag | returns a zig zag curve in the interval [0 2*pi] | 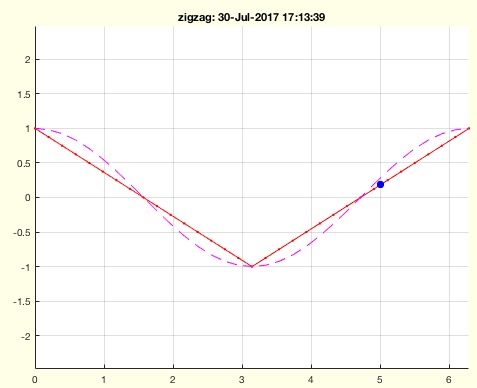 |