by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Kinematics and Frames
Introduced first in SolidGeometry 5.1, Creation date: 2021-02-28, Last change: 2025-09-15
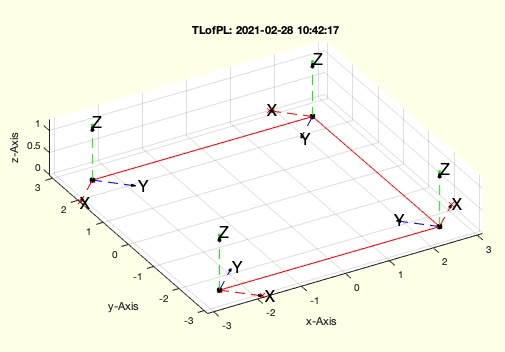
[TL2,TL3]=TLofPL(PL,[usem,nonc,z,"TLofCVL"])
PL: | Point list | |
usem: | if true (default is false); the y vector shows to the center of rotation, default is x shows towrds the next point | |
nonc: | if true (default), the TL will be elongated by the last point (and is not closed); | |
z: | z value for T3 cases; default is 0 | |
"TLofCVL": | if used, the output (using true,true) is similar to TLofCVL |
TL2: | [3x3x n] 2D HT matrix array | |
TL3: | [4x4x n] 3D HT matrix array |
testfunctTL('TLofPL(PLcircle(40,8),#1,#2), view(0,90)',[0 1],[0 1]) % Understand all conditions
TLofPL(PLsquare([30 20]),true,false) % understand the four conditions
TLofPL(PLsquare([30 20])) % ex to next point, but not for the last point
TLofPL(PLsquare([30 20]),true) % ex to next point, but the angle is the mean value at edges
TLofPL(PLsquare([30 20]),false,false) % ex to next point, also for last point (close)
TLofPL(PLsquare([30 20]),true,false) % close contour with mean values
TL3=Trotate(TL3,'x',pi/2);TL3=Trotate(TL3,'y',pi/2); % compatibility with TLofCVL
TLofPL(PLcircle(50,12),true,true,'TLofCVL'), TLP=ans; TLofCVL(PLcircle(50,12)+ [0 0]), TLC=ans; dbplot(TLP,TLC) %% Compatiblility