by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Kinematics and Frames
Introduced first in SolidGeometry 5.2, Creation date: 2022-11-04, Last change: 2025-09-15
See Also: isSG
, mat2celldim3
, cell2matdim3
ii=isT(T)
T: | 3x3 or 4x4 HT frame or array or cell list |
ii: | result true or false |
isT(eye(3))
isT(eye(4))
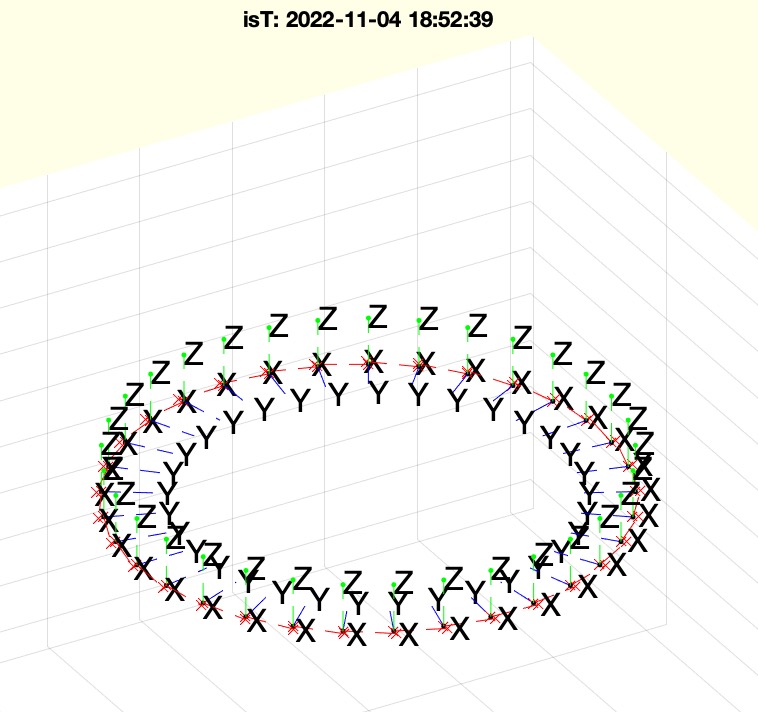
TL=TofPLpath(PLcircle)
isT(TL)
isT(mat2celldim3(TL))
isT(rot([3,3,3]))This function, isT, determines whether a given variable T is a homogeneous transformation (HT) matrix or a list of HT matrices. The function is part of the SolidGeometry library and was introduced in version 5.2.
T is a 3x3 matrix and its third row is [0 0 1]. If true, set ii to true.T is a 4x4 matrix and its fourth row is [0 0 0 1]. If true, set ii to true.T is a 3D array with more than one matrix along the third dimension, iterate through each matrix and recursively check if each is an HT matrix. Set ii to true only if all matrices are HT matrices.T is a cell array, iterate through each cell and recursively check if each element is an HT matrix. Set ii to true only if all elements are HT matrices.ii to false.If the function is called without output arguments and ii is true, it will call SGfigure and tplot to visualize the transformation.