SGTcalibchain
by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Kinematics and Frames
Introduced first in SolidGeometry 3.9, Creation date: 2017-06-16, Last change: 2025-09-14
changes the base frames of a set of solid geoemtries
Description
This function is useful if frames such as base frame or follower frame were originally created manually from the STL files using SGTui but the real frames have other orientations.
In this case, the function SGTchain shows only the right pose for a set of angles if an angle offset if added. If this offset angle is known, the real configuration can be shown by SGTchain(offset) using the offset angles.
To avoid the offset angle it is possible to calibrate the z axis of the Base frame or the follower frame.
See Also: SGTchain
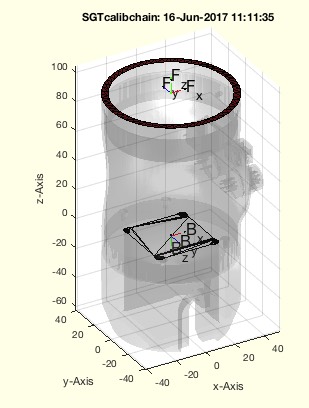
Example Illustration
Syntax
SGn=SGTcalibchain(SGs,[phi,Fram])
Input Parameter
SGs: | | Set of solids, with base and folloer frame |
phi: | | offset angle for the |
Fram: | | Frame name; default is 'B' |
Output Parameter
SGn: | | Set of solids, with turned frames |
Examples
load JACO_robot.mat
SGTchain(JACO,[[0 0 -90 +180 +90 180 180]]/180*pi); view(-160,0); % shows the zeros pose using an offset
X=SGTcalibchain(JACO,[[0 0 -90 +180 +90 180 180]]/180*pi) % turns the base frames
SGTchain(X,[0 0 0 0 0 0 0])
SGTchain(X,[0 0 180 180 0 0 0]/180*pi); view(-160,0)
Copyright 2017-2025 Tim C. Lueth. All rights reserved. The code is the property of Tim C. Lueth and may not be redistributed or modified without explicit written permission. This software may be used free of charge for academic research and teaching purposes only. Commercial use, redistribution, modification, or reverse engineering is strictly prohibited. Access to source code is restricted and granted only under specific agreements. For licensing inquiries or commercial use, please contact: Tim C. Lueth
Last html export of this page out of FM database by TL: 2025-09-21