SGTchain
by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Kinematics and Frames
Introduced first in SolidGeometry 3.9, Creation date: 2017-06-14, Last change: 2025-09-14
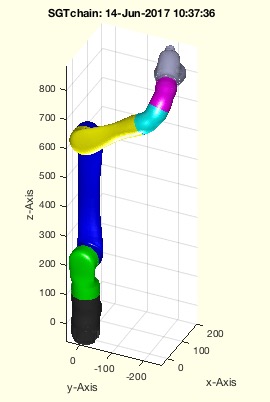
returns the spatial transformed solids of a kinematic chain
Description
If no extra parameters are used, all connections are done using 'B' Base frame and 'F' Follower Frame
The first rotation is currently ignored and can be called using NaN or zeros. i.e. the base frame of the first element is always unchanged.
The parameter nums, extr, B and F are identical to SGTframechain to define a the frame chain
for improved reaing and debugging it is possible to create a frame chain once and use it as parameter nums
ATTENTION THE FORMAT FOR THE EXTRA CHAINING DID CHANGE IN SG-Lib 4.7 FROM CHAR TO CELL
Instead: [SG1ind FFrame SG2ind BFrame] such as [1 'F' 2 'B']
now use: {SG1ind FFrame SG2ind BFrame} such as {1 'F' 2 'B'}
See Also: SGTframeChain
, SGTBB
, SGTcalibchain
, SGTplot
, SGTui
Example Illustration
Syntax
SGn=SGTchain(SGs,[phi,z,nums,extr,B,F])
Input Parameter
SGs: | | Cell list of n Solid Geometries |
phi: | | vector of length n of radial rotations around the F-z frame |
z: | | optional z value in ez direction |
nums: | | optional chaining; nums can also be SGTframechain |
extr: | | extra chaining [SG1ind FFrame SG2ind BFrame] such as [1 'F' 2 'B'] |
B: | | Standard Base frame string; default is 'B' |
F: | | Standard follower frame string; default is 'F' |
Output Parameter
SGn: | | Cell list of n spatial transformed Solid Geometries |
Examples
loadweb('JACO_robot.mat')
JACO={JC0,JC1,JC2,JC3,JC4,JC5,JC6}
SGfigure; SGplot(JACO); view(-30,30); show
SGTchain(JACO,[NaN pi/2]);
SGTchain(JACO,[NaN pi/1 pi/2 pi/3 pi/4 pi/5 pi/6]);
a=JACOget('joints',1:6)
SGTchain(JACO,[+[NaN a]+[0 0 -90 +180 +90 180 180]]/180*pi); view(-160,0)
ad=[-90 160 44 90 90 90]/180*pi; SGTchain(JACO,[NaN ad]); view(-160,0);
Fchain=SGTframeChain(1:7,[7 'F' 8 'B' 7 'F2' 8 'B' 7 'F3' 8 'B'])
SGTchain(JACO,[NaN pi/2 pi pi],+100,Fchain)
Copyright 2017-2025 Tim C. Lueth. All rights reserved. The code is the property of Tim C. Lueth and may not be redistributed or modified without explicit written permission. This software may be used free of charge for academic research and teaching purposes only. Commercial use, redistribution, modification, or reverse engineering is strictly prohibited. Access to source code is restricted and granted only under specific agreements. For licensing inquiries or commercial use, please contact: Tim C. Lueth
Last html export of this page out of FM database by TL: 2025-09-21