by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Kinematics and Frames
Introduced first in SolidGeometry 4.9, Creation date: 2020-07-28, Last change: 2025-09-14
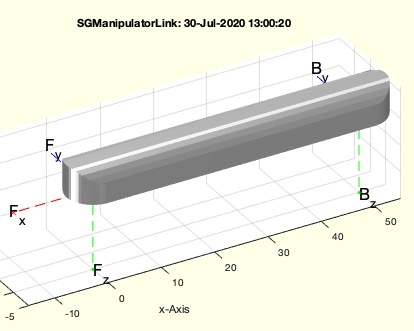
SG=SGManipulatorLink([LL,Shap,LD,LH,DD])
LL: | Axis Distance; default is 40; or [Startpoint;Endpoint] | |
Shap: | if true; the links are shaped; default is false | |
LD: | Radius of the Tip rounding; default is 5 | |
LH: | Height of the Elements also used as shaping Radius; default is 6 | |
DD: | if true; the shape is doubled for chaining; default is false |
SG: | Link Geometry |
SGManipulatorLink(40,true); SG=ans;
SGdimensioning4(SG);
[P,N]=SGdesignBallbearing([2.5 7 3.5]); % Create Space for Shaft
SG=SGsubtract(SG,P,'alignT',{'C','B'});
SG=SGsubtract(SG,N,'alignT',{'C','F'}); SGfigure(SG);
SGManipulatorLink(40,true); SG=ans;
[P,N,S]=SGdesignDIN912DIN985([3 10 0],'TT',40,pi/2);
SG=SGsubtract(SG,P,'alignT',{'C','B'});
SG=SGsubtract(SG,N,'alignT',{'C','F'}); SGfigure(SG);