by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Kinematics and Frames
Introduced first in SolidGeometry 5.5, Creation date: 2025-07-09, Last change: 2025-09-15
SGN=SGTtransT([SG,T,TM,az])
SG: | Solid with frames for SGTalignT, SGTmatchT | |
T: | Frame name | |
TM: | Reference frame; default is eye(4) | |
az: | rotation around final z axis |
SGN: | would be the transformed SG by SGTalignT, SGTmatchT |
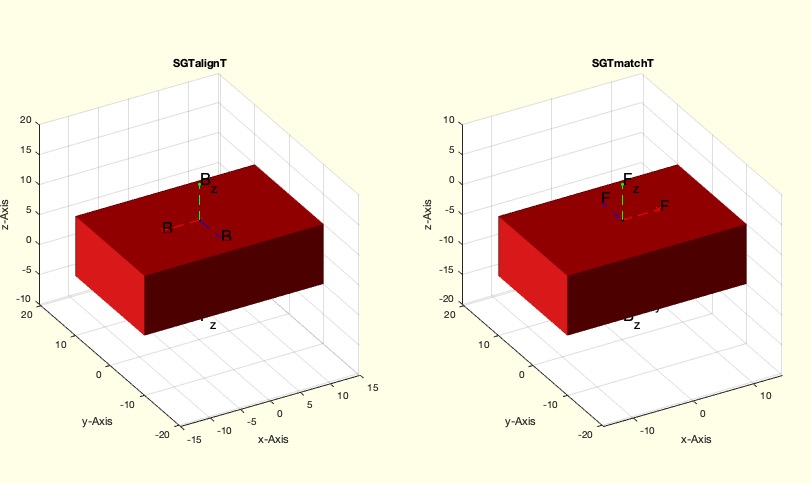
A=SGTsetBFsimple(SGbox('noframe'))
AA=SGTalignT(A,'F'); AM=SGTmatchT(A,'F'); SGfigure;
subplot(1,2,1); SGTplotalpha(AA); title('SGTalignT'); subplot(1,2,2); SGTplotalpha(AM); title('SGTmatchT'); view4all(-30,30);This function, SGTtransT, is part of the Solid Geometry Library and is designed to handle transformations of solid geometries with frames. However, the function itself does not perform any operations and instead prompts the user to use either SGTalignT or SGTmatchT for frame transformations.
SGTalignT or SGTmatchT functions.eye(4), which represents no transformation.The function begins by retrieving the input parameters using the getfuncparams function. This function extracts the parameters from the input arguments, applying default values if necessary.
After retrieving the parameters, the function immediately triggers an error message, instructing the user to use either SGTalignT or SGTmatchT for frame transformations. This indicates that the function is not intended to be used directly for transformations but serves as a placeholder or guide for users to select the appropriate transformation function.
An example is provided in the comments to illustrate how to use the related functions:
A = SGTsetBFsimple(SGbox('noframe'));
AA = SGTalignT(A, 'F');
AM = SGTmatchT(A, 'F');
SGfigure;
subplot(1,2,1); SGTplotalpha(AA); title('SGTalignT');
subplot(1,2,2); SGTplotalpha(AM); title('SGTmatchT');
view4all(-30,30);
This example demonstrates creating a simple solid geometry, aligning it using SGTalignT, matching it using SGTmatchT, and plotting the results.