SGTsetofFS
by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Kinematics and Frames
Introduced first in SolidGeometry 4.0, Creation date: 2017-07-27, Last change: 2025-09-14
creates a frame based on a features surface and a selector
Description
The selector can be
a) scalar: just the number of the feature surface
b) vector: the normal vector of the feature surface;
c) HT-matrix: at least a point and the normal vector must belong to the surface
using this parameters, the feature surface is selected as clicked
d) now it is possible to select features
e) new it is possible to rotate by a simple value, rotation matrix or transformation
See Also: SGTui
, SGTset
, SGTsetorigin
, SGTget
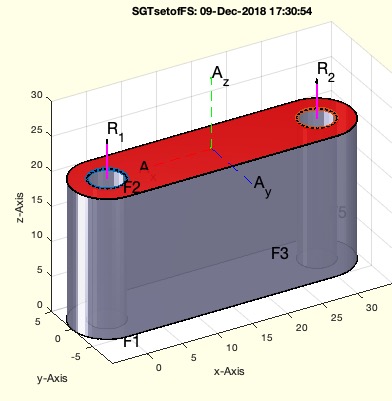
Example Illustration
Syntax
[SGN,T,h,Rorg]=SGTsetofFS(SG,[T,N,Rz,fs,fe])
Input Parameter
SG: | | Solid Geoemtry |
T: | | Number of feature surface or normal vector of HT matrix |
N: | | Name of 'Frame' to be set |
Rz: | | optional rotation value, matrix or HT matrx |
fs: | | optional Feature symbol such as 'R1'; |
fe: | | feature edge/surface angle; default is 1rad ~ 60 degree |
Output Parameter
SGN: | | Sg with added Frame |
T: | | Transformation matrix of frame |
h: | | handle to graphics patch |
Rorg: | | Radien list |
Examples
SGofCPLcommand('Co 10 40 5, h 20, save A'); A=A.SG;
SGTsetofFS(A,2,'A');
SGTsetofFS(A,2,'A',pi/2);
SGTsetofFS(A,2,'A',pi/2,'R2');
Copyright 2017-2025 Tim C. Lueth. All rights reserved. The code is the property of Tim C. Lueth and may not be redistributed or modified without explicit written permission. This software may be used free of charge for academic research and teaching purposes only. Commercial use, redistribution, modification, or reverse engineering is strictly prohibited. Access to source code is restricted and granted only under specific agreements. For licensing inquiries or commercial use, please contact: Tim C. Lueth
Last html export of this page out of FM database by TL: 2025-09-21