by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Kinematics and Frames
Introduced first in SolidGeometry 4.7, Creation date: 2019-07-03, Last change: 2025-09-14
See Also: SGTframeChain
, SGTchain
, vecinterpolate
[h,axG]=SGTchainanimation(SGs,[IVL,z,Fchain,stp,axo]);
SGs: | Cell list of Solids to move | |
IVL: | Rows of angle values for the joints | |
z: | z value for explosion drawings | |
Fchain: | number of steps between two rows of IVL; default is 1 | |
stp: | number of interpolation betweem two rows | |
axo: | optional axis definition |
h: | handle to the drawing | |
axG: | automated created axis/Bounding box for the movement |
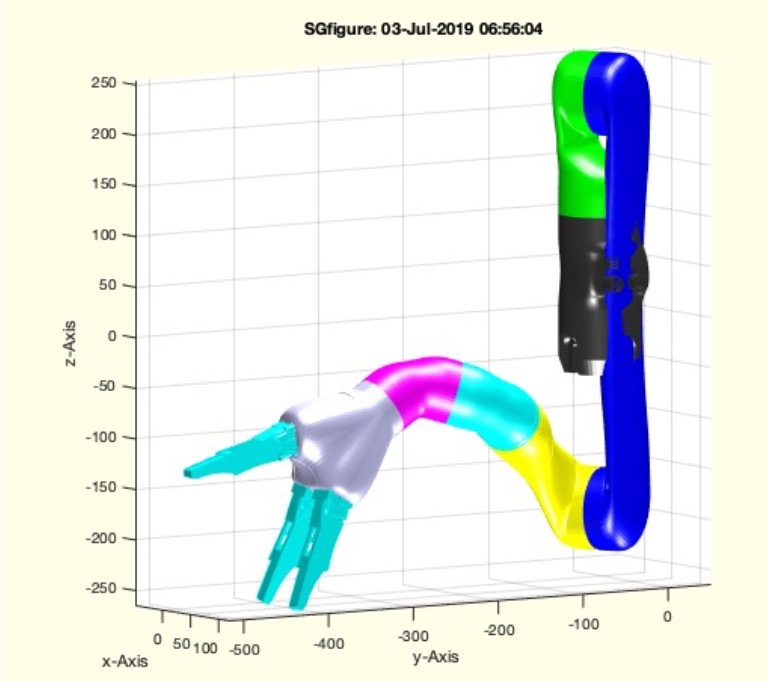
w1=pi/2
SGTchainanimation(JACO,[NaN -w1/3 w1 pi/3 w1 w1 pi/6; [NaN -w1/3 w1 pi/3 w1 w1 pi/6] + pi],0,Fchain,50); % Move the solids w,r,t to the Frame Structure
[~,BBJACO]=BBofSG(JACO,true)
SGTchainanimation(BBJACO,[NaN -w1/3 w1 pi/3 w1 w1 pi/6; [NaN -w1/3 w1 pi/3 w1 w1 pi/6] + pi],0,Fchain,50); % Move the solids w,r,t to the Frame Structure