by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Kinematics and Frames
Introduced first in SolidGeometry 5.2, Creation date: 2022-06-01, Last change: 2025-09-15
See Also: TofDPhi
, TofDPhiH
, TofP
, TofPEul
, TofPez
, TofPose
, TofR
, TofSG
, TofSGML
, TofSGez
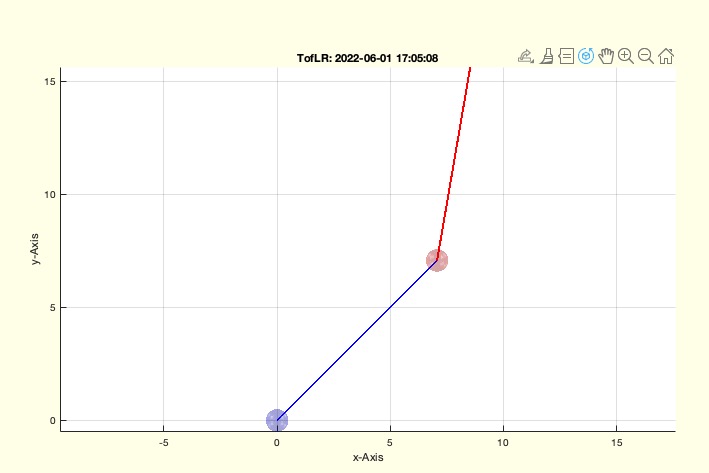
T=TofLR([L,R,T0])
L: | length of a link or [L wz] or [L wx wy wz] | |
R: | angle of a joint at the beginning of the link or just [wz] or [wx wy wz] | |
T0: | Frame the is is linked to default is eye(4); or List of L or cell list of T |
T: | Homogenoues transformation matrix |
TofLR(10,[pi/4 pi/4 0],TofLR(10,pi/4));
TofLR([10 pi/4],'',[5 0 0 pi/3; 5 0 pi/6 0; 5 0 0 -pi/4 ])
TofLR([10 pi/4],'',{TofPez([10 10 10],[0 1 1])})