xyofez
by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Kinematics and Frames
Introduced first in SolidGeometry 5.5, Creation date: 2024-11-14, Last change: 2025-09-15
returns for a simple ez vector the ex and ey orthonormal vectors
Description
mainly the same as TofPez. This function is required if, for example, 3D contours are to be created along a 3D path in space. If these are circles with identical diameters, the complexity of the problem is not noticeable. However, as soon as a rectangular cross-section is used, it is clear that the x and y orientation, which must always be perpendicular to the path, must also be continuous and differentiable, otherwise spontaneous rotations of 90, 180 or 270 degrees may occur. The direction must not change. Once you have started with an - initially arbitrary - alignment, the subsequent vectors X and Y must be aligned accordingly. However, if the direction of the path changes by more than 90 degrees, the alignment of the X and Y axes is ambiguous. The difference is implemented in VLedgeNormal.
See Also: TofPez
, VLedgeNormal
Example Illustration
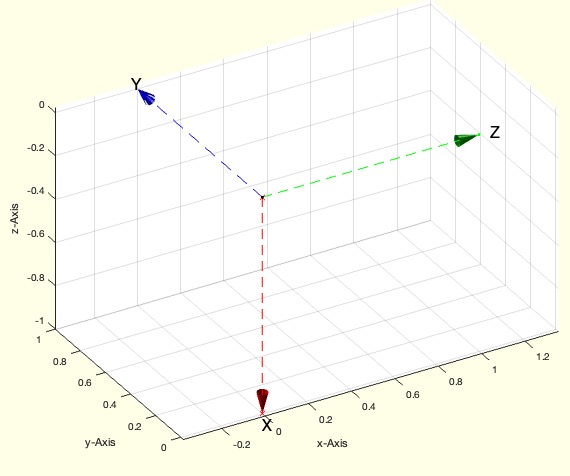
Syntax
[ex,ey,ez]=xyofez(ez)
Input Parameter
ez: | | Richtungsvektor eines Pfades |
Output Parameter
ex: | | orthogonal vector to ez |
ey: | | orthogonal vector to ex and ez |
ez: | | normalized vector ez |
Examples
xyofez([0 0 1])
xyofez([1 0 0])
Copyright 2024-2025 Tim C. Lueth. All rights reserved. The code is the property of Tim C. Lueth and may not be redistributed or modified without explicit written permission. This software may be used free of charge for academic research and teaching purposes only. Commercial use, redistribution, modification, or reverse engineering is strictly prohibited. Access to source code is restricted and granted only under specific agreements. For licensing inquiries or commercial use, please contact: Tim C. Lueth
Last html export of this page out of FM database by TL: 2025-09-21