by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Kinematics and Frames
Introduced first in SolidGeometry 5.4, Creation date: 2023-10-10, Last change: 2025-09-15
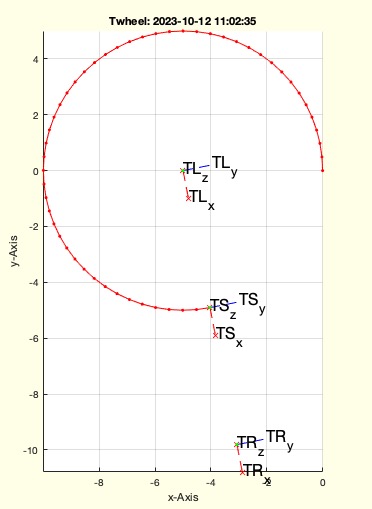
[TS,PL,TR,TL]=TofWheel(D,[w])
D: | Distance between the two weels in x | |
w: | movement in rad |
TS: | Center Frame after movement | |
PL: | path of movement | |
TR: | Frame of result of right wheel | |
TL: | Frame of result of left wheel |
TofWheel(30,[0 270]/180*pi)
SGR=SGofCPLcommand("b 30 40,h 10, enter, sph 10, rel center, rel alignback 5, rel alignleft -2,swap, enter, sph 10, rel center, rel alignback 5, rel alignright -2,add, swap , add, enter, c 12, h 5,roty 90,rel alignbottom 1, rel alignleft 5, rel infront -5, add, enter, c 12, h 5,roty 90,rel alignbottom, rel alignright 5, rel alignfront, add");
TR=eye(3)
for i=1:100
d=rand(1,2)/5; % robot creates random numbers for the wheel movement
% Create robot animation
TR=TR*TofWheel(30,d); delete(hr); hr=SGplotalpha(SGtransT(SGR,T3ofT2(TR)),'g',0.5);
axis tight; view(-30,30); drawnow;
end