SGTsetofRLcenter
by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Kinematics and Frames
Introduced first in SolidGeometry 5.1, Creation date: 2021-03-16, Last change: 2025-09-15
returns a frame of a surface that is defined by drilling holes
See Also: TofFSRLcenter
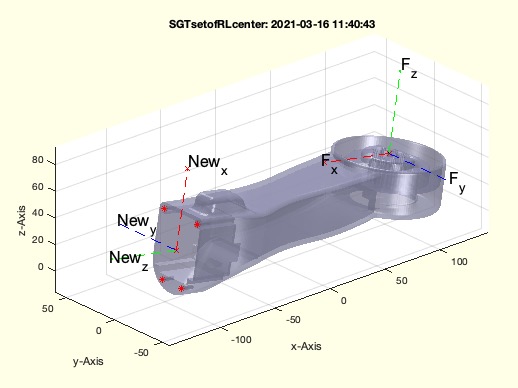
Example Illustration
Syntax
SG=SGTsetofRLcenter([SG,fi,N,minmaxR,minmaxW])
Input Parameter
SG: | | Solid Geometry |
fi: | | optiona facet index; default is ''; ==> interavtive |
N: | | Name of Frame |
minmaxR: | | minmax for radius default is [1.1 1.9] |
minmaxW: | | minmax for arc circle default is [170 360] |
Output Parameter
SG: | | Solid including Frame |
Examples
load Yannick_robot.mat
SGTsetofRLcenter(YKLower); SG=ans;
Copyright 2021-2025 Tim C. Lueth. All rights reserved. The code is the property of Tim C. Lueth and may not be redistributed or modified without explicit written permission. This software may be used free of charge for academic research and teaching purposes only. Commercial use, redistribution, modification, or reverse engineering is strictly prohibited. Access to source code is restricted and granted only under specific agreements. For licensing inquiries or commercial use, please contact: Tim C. Lueth
Algorithm (Workflow)
This function, SGTsetofRLcenter, is part of the Solid Geometry (SG) library and is used to define a frame of a surface by drilling holes. Below is a detailed explanation of the algorithm and its parameters.
Input Parameters
- SG: The Solid Geometry object that represents the 3D model.
- fi: An optional facet index. If not provided, it defaults to an empty string, indicating interactive mode.
- N: The name of the frame. If not specified, it defaults to 'N'.
- minmaxR: A vector specifying the minimum and maximum radius for the holes. The default value is [1.1, 1.9].
- minmaxW: A vector specifying the minimum and maximum arc circle. The default value is [170, 360].
Output
- SG: The updated Solid Geometry object that includes the frame.
Algorithm Steps
- Retrieve the input parameters using the
getfuncparams function. This function extracts the parameters from the input arguments, applying default values if necessary.
- Call the function
TofFSRLcenter with the parameters SG, fi, al (set to 0), minmaxR, and minmaxW. This function returns four outputs: TF, TB, RL, and URL.
- Update the Solid Geometry object
SG by setting the frame using the SGTset function. This function is called twice: once to set the front frame TF with the name [N 'F'], and once to set the back frame TB with the name [N 'B'].
- Determine the number of radii by calculating the size of
RL along the first dimension.
- If no output is expected (i.e.,
nargout == 0), perform the following actions:
- Print a debug message displaying the number of radii found and their values using
dbprintf and sprintfvec.
- Call
SGfigure to set up a figure with specific viewing angles.
- Plot the Solid Geometry object
SG with transparency using SGTplotalpha.
- Plot the radii locations using
VLplot with red asterisks.
Algorithm explaination created using ChatGPT on 2025-08-19 06:44. (Please note: No guarantee for the correctness of this explanation)
Last html export of this page out of FM database by TL: 2025-09-21