by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Kinematics and Frames
Introduced first in SolidGeometry 5.1, Creation date: 2021-12-05, Last change: 2025-09-15
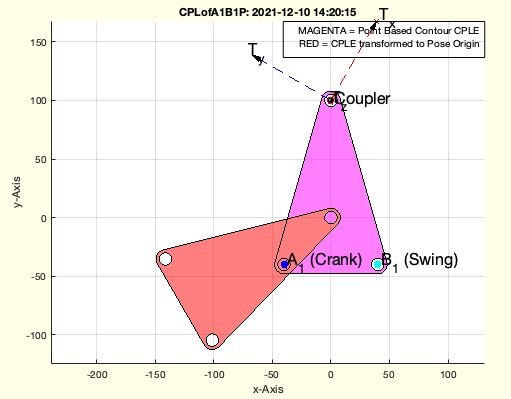
[CPLE,T,CPLX]=CPLofA1B1P([A1,B1,P0,R12o,CPLN])
A1: | Position of A1 | |
B1: | Position of B1 | |
P0: | 1) Position of Pose or 2) Frame of Pose wen A1 B1 is reached | |
R12o: | Outer and inner Radius for linkages | |
CPLN: | CPLE as additional contour; 0 for an automatic shaped |
CPLE: | CPLE | |
T: | Frame of Pose at | |
CPLX: | CPLE at Position T |
CPLofA1B1P([30 0; 0 40; 0 0]);
CPLofA1B1P([30 0], [0 40], [0 0]);
CPLofA1B1P([30 0], [0 40], TofR(rot(pi/4),[0 0]));
CPLofA1B1P([30 0], [0 40], TofR(rot(pi/4),[40 40]));
CPLofA1B1P([30 0], [0 40], TofR(rot(pi/4),[40 40]),'',PLgearDIN(2)); % Add a gear
CPLofA1B1P([30 0], [0 40], TofR(rot(pi/4),[40 40]),'',0); % Add a small L