by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Automatic Design
Introduced first in SolidGeometry 5.3, Creation date: 2023-03-15, Last change: 2025-09-15
See Also: , SGsubtractnaddTL
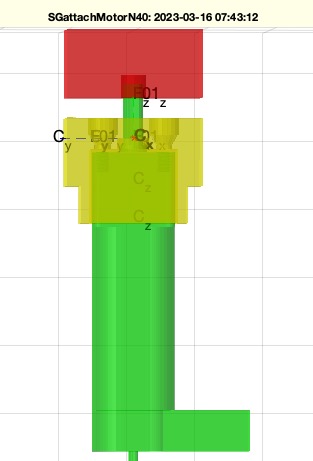
[SGR,SGA,SGS,Parts]=SGattachMotorN40([SGR,SGA,PL,LW,"debug"])
SGR: | Solid the motor should be screwed with | |
SGA: | Solid that will be driven by motor axis | |
PL: | List of Point | |
LW: | Dimension of housing length and screw size; see SGdesignMotorN40 | |
"debug": | if individual designsteps should be shown |
SGR: | Modified SGRack | |
SGA: | Modified SGAxis | |
SGS: | Motor Solid | |
Parts: | list of parts for assembly |
A=SGtransP(SGbox('noframe'),[0 0 -2])
B=SGtransP(SGbox('noframe'),[0 0 11])
SGattachMotorN40 (A,B)