VLFLmotorBodySocket
by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - SG/Solids
Introduced first in SolidGeometry 1.0, Creation date: 2012-01-02, Last change: 2025-09-14
returns the vertex/facet list for a body socket of a servo motor
Description
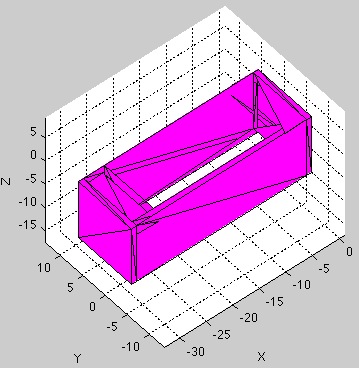
Without any parameters this function generates a body socket for a servo motor, i.e. the digital servo FUTABA S3156. The x/y-planes descibe the lower side of the socket blocks. Therefor the socket is in negative direction of z.
See Also:
Example Illustration
Syntax
[VL,FL]=VLFLmotorBodySocket([sl,sb,ax,bb,bh,wh,wb])
Input Parameter
sl: | | length of the motor body in x; default is 32 (FUTUBA S3156) |
sb: | | width of the motor body in y; default is 11 (FUTUBA S3156) |
ax: | | position of the motor axis in x; default is 10 (FUTUBA S3156) |
bb: | | width of the socket blocks; default is 4 mm |
bh: | | height of the socket blocks; default is 2 mm |
wh: | | height of the motor body socket housing; default is 10 mm |
wb: | | width of the motor body sockethousing; default is 1 mm |
Output Parameter
VL: | | Vertex list of the body socket of a servomotor |
FL: | | Facet list of the body socket of a servomotor |
Examples
Generate a body socket for the FUTUBA S3156 digital servo
[VL,FL]=VLFLmotorBodySocket (32,11,10);
VLFLplot(VL,FL,'m');
view (0,0), axis equal, xlabel 'X', ylabel 'Y', zlabel 'Z'
Copyright 2012-2025 Tim C. Lueth. All rights reserved. The code is the property of Tim C. Lueth and may not be redistributed or modified without explicit written permission. This software may be used free of charge for academic research and teaching purposes only. Commercial use, redistribution, modification, or reverse engineering is strictly prohibited. Access to source code is restricted and granted only under specific agreements. For licensing inquiries or commercial use, please contact: Tim C. Lueth
Last html export of this page out of FM database by TL: 2025-09-21