by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Visualization
Introduced first in SolidGeometry 2.8, Creation date: 2015-11-25, Last change: 2025-09-14
im2stereo(I1,I2)
I1: | RGB image 1 | |
I2: | RGB image 1 |
url='http://192.168.178.67:8020/image.jpg'; I=imread(url); close all; imshow(I); I1=I;
url='http://192.168.178.67:8020/image.jpg'; I=imread(url); close all; imshow(I); I2=I;
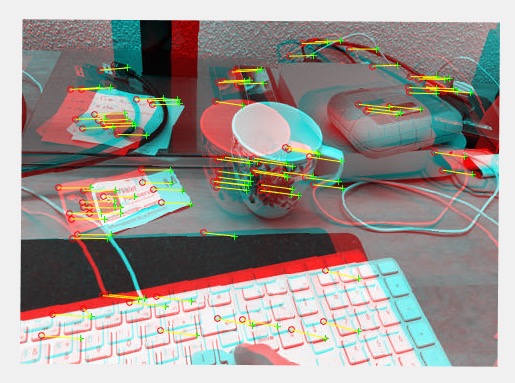
im2stereo(I1,I2)
This function, im2stereo, is designed to find corresponding points between two images taken from different viewpoints. It is based on a MATLAB example and is part of the SolidGeometry library.
I1 and I2, to grayscale using rgb2gray. This is necessary because the feature detection functions work on single-channel images.detectHarrisFeatures. This function identifies interest points in the images.extractFeatures. This function computes feature descriptors for the interest points.matchFeatures. This function finds correspondences between the feature descriptors of the two images.indexPairs. The matched points are stored in matchedPoints1 and matchedPoints2.showMatchedFeatures. This function visualizes the correspondences between the two images.The function does not return any values but displays a figure showing the matched features between the two images.
Algorithm explaination created using ChatGPT on 2025-08-19 01:37. (Please note: No guarantee for the correctness of this explanation)