SGbendcone
by Nicholas Moser, SG-Lib Toolbox: SolidGeometry 5.6 - SG/Solids
, Creation date: 2020-01-21, Last change: 2025-09-14
bends a solid geometry around a conic segment with defined geometry
Description
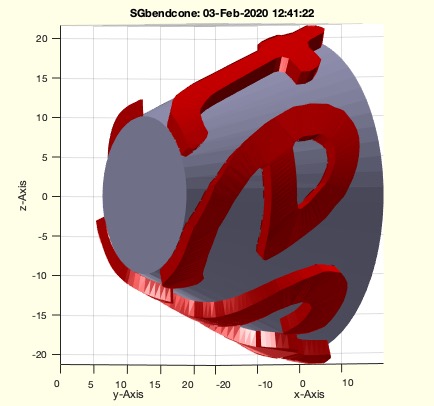
SGbendcone takes in a solid geometry and parameters defining the geometry of a cone centered along the y-axis. It returns the deformed solid so that it is wrapped around the virtual cone, with the xy-plane being transferred to the surface of this cone
See Also: SGbending
, SGofCPLbendonadrum
, SGcone
Example Illustration
Syntax
SG=SGbendcone(SG,R1,[R2,L,Rz1,Rz2])
Input Parameter
SG: | | Solid geometry to be bent |
R1: | | Radius of the cone at the xz-plane |
R2: | | Radius of the cone at a distance L along the +y-axis. Defaults to R1 |
L: | | Distance between R1 and R2. Defaults to furthest distance of solid geometry along +y-axis |
Rz1: | | radius in the z-direction. Together with R1, defines an elliptical cross-section |
Rz2: | | radius in the z-direction. Together with R2, defines an elliptical cross-section |
Output Parameter
SG: | | deformed solid geometry. Positioned as if the cone was centered on the y-axis |
Examples
SGofCPLzdelaunayGrid(CPLoftext('test'),2,.5); SGT=ans
SGbendcone(SGT,10,20)
This software may be used free of charge for academic research and teaching purposes only. Commercial use, redistribution, modification, or reverse engineering is strictly prohibited. Access to source code is restricted and granted only under specific agreements. For licensing inquiries or commercial use, please contact: Tim C. Lueth
Last html export of this page out of FM database by TL: 2025-09-21