SGof2T
by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - SG/Solids
Introduced first in SolidGeometry 3.2, Creation date: 2016-12-21, Last change: 2025-09-14
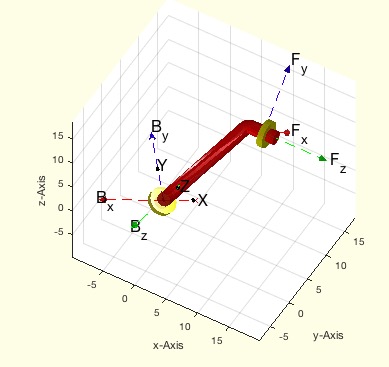
Creates a solid geometry between two frames
Description
The solid is created starting at frame 1 ending at frame 2 considering a minimal radius of Rv.
The solid is elongated starting before frame 1 and ends after frame 2 to implement penetration of links. Optional, it is possible to extrude a contour. Please make sure that radius Rv is at least 2.5 time the maximum distance of NCPL from the origin.
Base frame and Follower frame are added, but the base frame has its ez vector directing outside of the solid
See Also: TLofCVL
, SGofCPLtransT
, SGof2SGT
, SGof2CVL
, SGof2CPLz
, SGdesignfaceconnectingrod
Example Illustration
Syntax
SG=SGof2T(TA,TB,[elo,Rv,NCPL])
Input Parameter
TA: | | Frame A |
TB: | | Frame B |
elo: | | elongation of the solid for penetration; default is 0.001 |
Rv: | | Radius; default is 4 |
NCPL: | | Optional Contour; Default is PLcircle(Rv) |
Output Parameter
Examples
SGof2T(eye(4),TofR(rot(0,pi,0),[20 0 0]))
Copyright 2016-2025 Tim C. Lueth. All rights reserved. The code is the property of Tim C. Lueth and may not be redistributed or modified without explicit written permission. This software may be used free of charge for academic research and teaching purposes only. Commercial use, redistribution, modification, or reverse engineering is strictly prohibited. Access to source code is restricted and granted only under specific agreements. For licensing inquiries or commercial use, please contact: Tim C. Lueth
Last html export of this page out of FM database by TL: 2025-09-21