checkfourbar2Poseattachpermutation
by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - 4Bar/Linkages
Introduced first in SolidGeometry 5.1, Creation date: 2021-12-01, Last change: 2025-09-15
Returns solutions for the 2 Pose Sythesis
Description
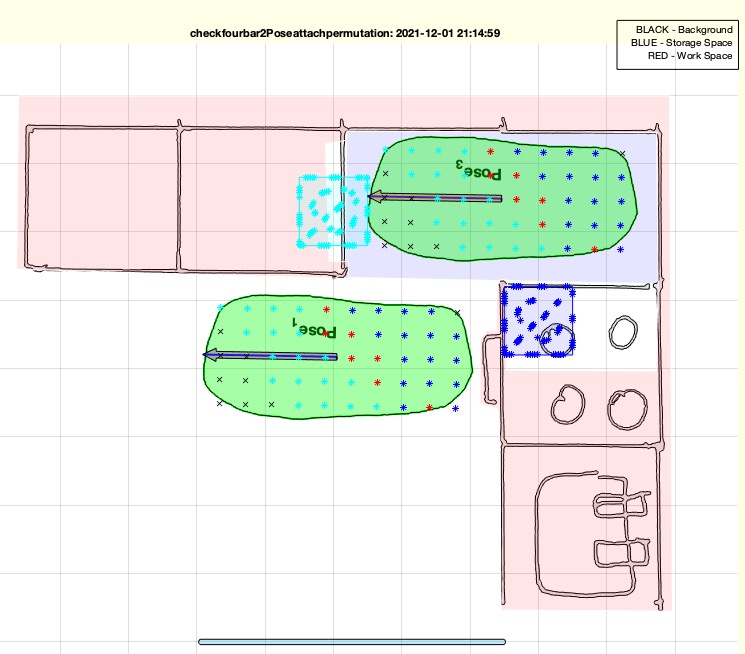
The 3 poses synthesis searches for frame points and attachment points on an effector so that it can perform a certain movement. It is possible that one of the three poses was selected in an unsatisfactory way, so that the frame points are not located in the desired area. A manual shift and visualization of the effect is given with the Posetransui function. This function Posetrans4basepos is an attempt to fix two poses and analyze where the third pose would be and whether the solution is acceptable, based on the desired frame point positions.
See Also: isincirclesegment
, Posetransui
, checkfourbar3Poseattachpermutation
, checkfourbar1Poseattachpermutation
, Posefourbarplotcouplercurve
Example Illustration
Syntax
PS=checkfourbar2Poseattachpermutation(PS,[psel,m])
Input Parameter
PS: | | Pose struct |
psel: | | Selection of poses to fix; typically the end poses |
m: | | [GridNr distlink dist base] |
Output Parameter
PS: | | Pos including field 'solut' |
Examples
fname=loadweb('Posebasecabinet.APD'); PS=PosereadAPD(fname);
PosereadAPD('/Volumes/LUETH-WIN/MATLAB_files_for_experiments/basecabinet_new.APD');PS=ans;
PS=checkfourbar3Poseattachpermutation(PS)
PS=Posetransui(PS)
checkfourbar2Poseattachpermutation(PS,[1 3]); PS=ans;
Copyright 2021-2025 Tim C. Lueth. All rights reserved. The code is the property of Tim C. Lueth and may not be redistributed or modified without explicit written permission. This software may be used free of charge for academic research and teaching purposes only. Commercial use, redistribution, modification, or reverse engineering is strictly prohibited. Access to source code is restricted and granted only under specific agreements. For licensing inquiries or commercial use, please contact: Tim C. Lueth
Last html export of this page out of FM database by TL: 2025-09-21