smbFullModelSimulation
by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - SimMechanics
Introduced first in SolidGeometry 3.1, Creation date: 2016-12-19, Last change: 2025-09-14
returns a SG configuration at a given time
Description
WORK in PROGRESS: It is still unclear, why the function aborts so often during smbAddFrameSensor. It seems that there is no synchronisation when creating blocks and lines and subsystems.
The function analyzeses the current system bdroot and creates a list of solids. Afterwards the function adds frames sensors for each reference frame of the solid. Next, the SimMultiBody model is simulation until recording all solid-frames until the specified point of time is reached. Either the first or the last time is used to create a solid. Nevertheless, by using more than one output parameter, also other time frames can be used.
See Also: smbAddFrameSensor
, smbSimulate
, VLFL_EXP23
, VLFL_EXP26
, VLFL_EXP27
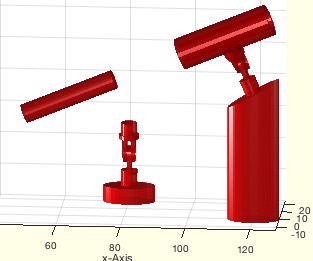
Example Illustration
Syntax
[SG,BNi,SGi,Ti,tm]=smbFullModelSimulation(t)
Input Parameter
t: | | Optional time value; default is 0 |
Output Parameter
SG: | | Compiled SG at the specific given time |
BNi: | | Names of the used solid geometries |
SGi: | | Solid geometries |
Ti: | | T matrixes of the solids over time |
tm: | | list of time values |
Copyright 2016-2025 Tim C. Lueth. All rights reserved. The code is the property of Tim C. Lueth and may not be redistributed or modified without explicit written permission. This software may be used free of charge for academic research and teaching purposes only. Commercial use, redistribution, modification, or reverse engineering is strictly prohibited. Access to source code is restricted and granted only under specific agreements. For licensing inquiries or commercial use, please contact: Tim C. Lueth
Last html export of this page out of FM database by TL: 2025-09-21