getCurrentPoint
SGmodelLink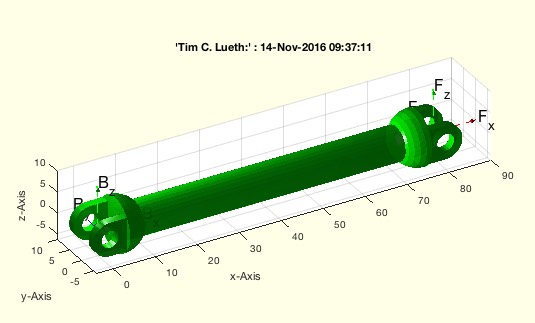
SGmodelLink1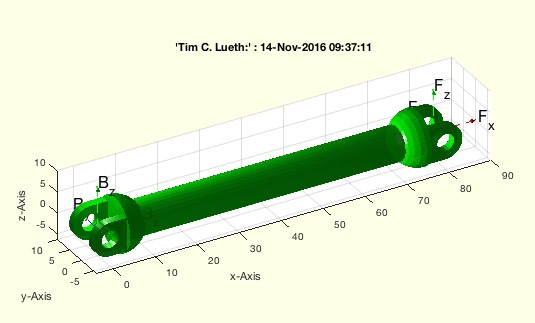
SGmodelMass
smbAddBlock
smbAddFrame
smbAddFrameSensor
smbAddLine
smbConvertSubsystem
smbCopyConnections
smbCreateBlockConst
smbCreateConnection
smbCreateDrive
smbCreateJoint
smbCreateSG
smbCreateSGJoint
smbCreateSGMass
smbCreateSGNode
smbCreateSineWave
smbCreateSpring
smbCreateStopJointC
smbCreateStopJointR
smbCreateSubsystem
smbDeleteDrive
smbDeleteUnconnectedLines
smbDrawNow
smbFilename
smbfindPMIOPort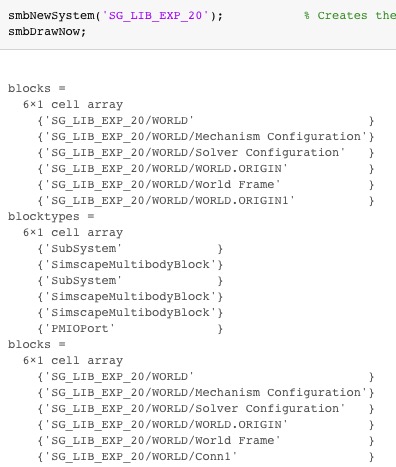
smbFullModelSimulation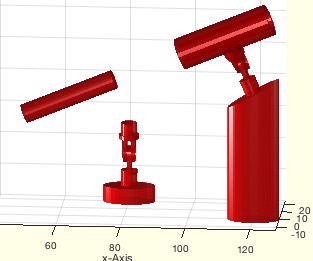
smbGetAllLines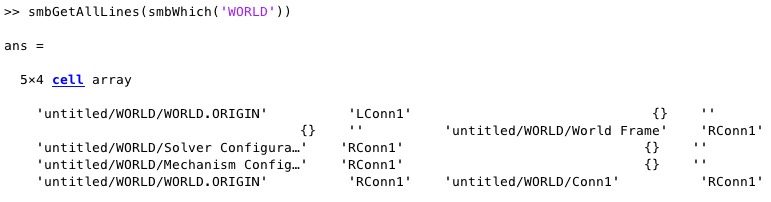
smbGetAllPorts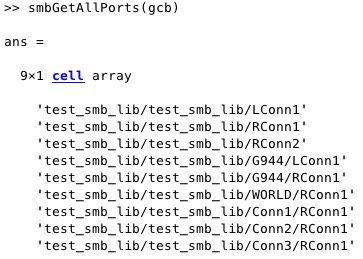
smbGetBlockInfo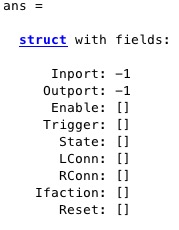
smbGetConnectedBlocks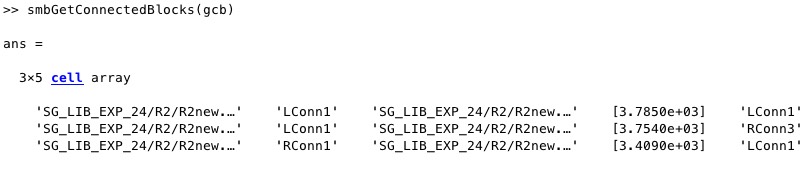
smbGetLibraryPath
smbGetPortofFrame
smbGetPorts
smbGetSubSystempath
smbhelp
smbLogOutputPort
smbNameofPort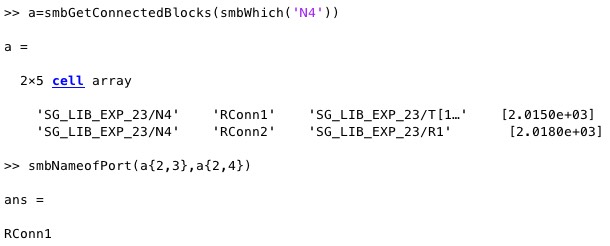
smbNewGridPos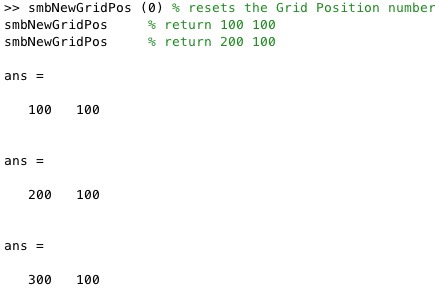
smbNewLineRouting
smbNewSystem
smbPosgcb
smbPSBlockname
smbPSLibCompile
smbPSLibCreateBlock
smbPSLibInstall
smbPSLibname
smbSetJointInputTorque
smbSetPosition
smbSetRotationMatrix
smbSetSimulationtolerance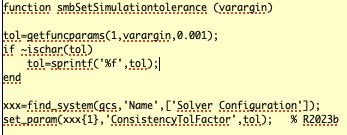
smbSetTransformationMatrix
smbSetTranslationVector
smbSGtransP
smbshow
smbSimulate
smbSysPortLineTable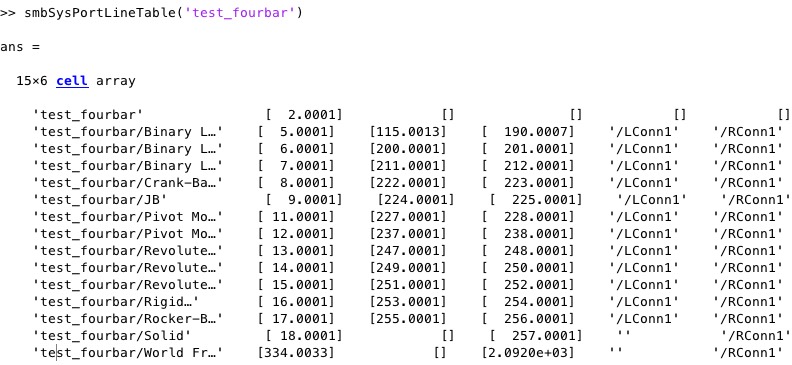
smbTofSimOut
smbVideoSimulation
smbWhich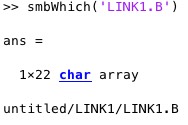
smlArduinoexample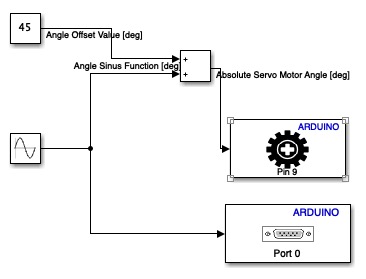
smlDeleteall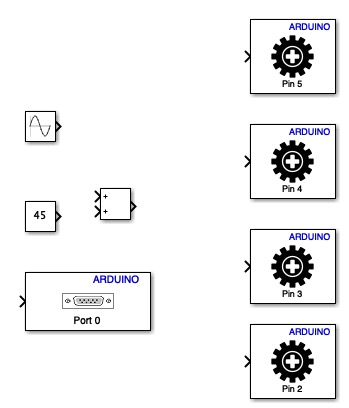
smlhelp
smlNewSystem