JACOsim
by Tim C. Lueth, SG-Lib Toolbox: SolidGeometry 5.6 - Serial-Robotics
Introduced first in SolidGeometry 3.9, Creation date: 2017-06-19, Last change: 2025-09-14
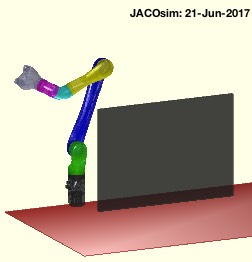
Simulates the behaviour of the JACO robot
Description
This function is used to simulate the behavior of the JACO robot which is helpful for visualization and collision detection and creating the programatically interface of JACOget and JACOset and JACOstruc.
JACOsim supports the following commands:
'init' = sets the JACOstruct to a predefined pose and 'shows' it
'joints',phi = changes JACOStruct if the pose is collision free
'show' = plots the pose of the joint values of JACOstruct
'shows',phi = plots the pose of the given joint values
'safe',{SG,'under'} = defines safety zones relative to JACO
'stl', SGs = modifies the kinematic chain/geometry of the robot
JACOsim without an parameter => JACOsim('show')
See Also: JACOget
, JACOset
, JACOstruct
Example Illustration
Syntax
[ANSW,t]=JACOsim([CMD,PVAL])
Input Parameter
CMD: | | command string |
PVAL: | | Parameter Values als cell or numeric value |
Output Parameter
Examples
JACOsim('init') % Sets the simulation to a initial pose
JACOsim('safe',{A,'alignbottom','infront',-200,'left',0}) % safety zone
JACOsim,('stl',SG) % modifies the kinematic chain/geometry of the robot
Copyright 2017-2025 Tim C. Lueth. All rights reserved. The code is the property of Tim C. Lueth and may not be redistributed or modified without explicit written permission. This software may be used free of charge for academic research and teaching purposes only. Commercial use, redistribution, modification, or reverse engineering is strictly prohibited. Access to source code is restricted and granted only under specific agreements. For licensing inquiries or commercial use, please contact: Tim C. Lueth
Last html export of this page out of FM database by TL: 2025-09-21