CPLraamboTCPgearnut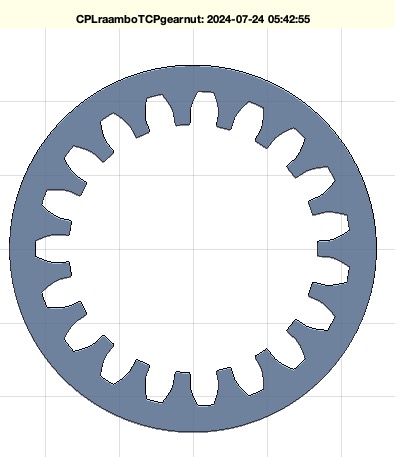
FTSCScmd
FTSCScmdfindserial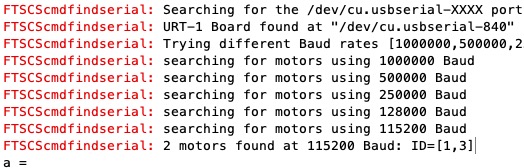
FTSCSdata
FTSCSmotorlist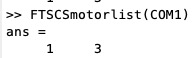
jaco05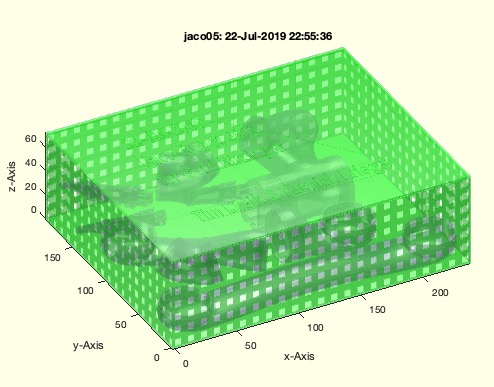
JACOget
JACOmodel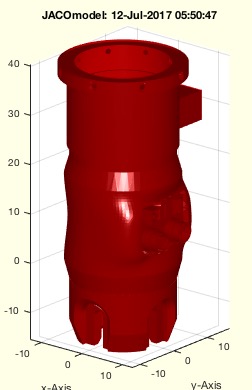
JACOset
JACOsim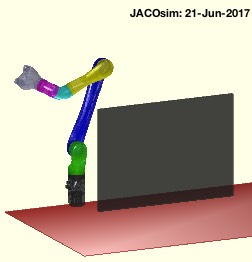
JACOstruct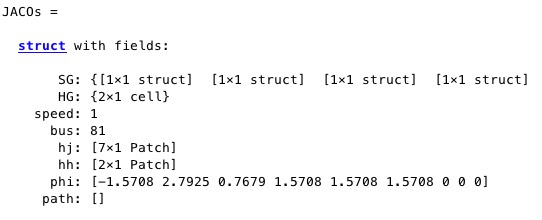
raambocommandlines
raamboGET
raamboscreen
raamboSET
raambostartup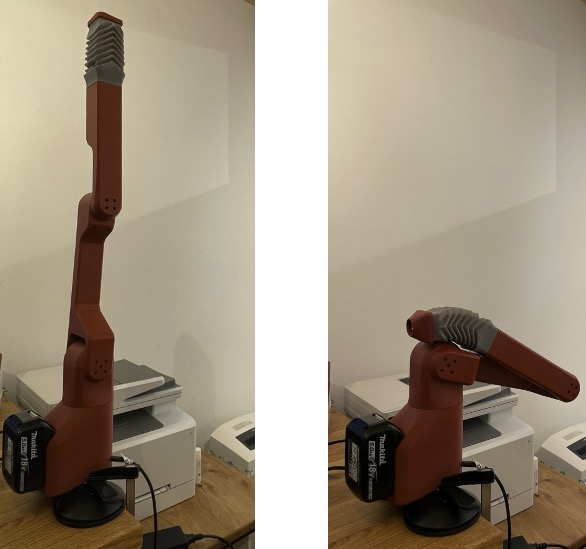
SGjacohand
SGmotorFeeTech40flange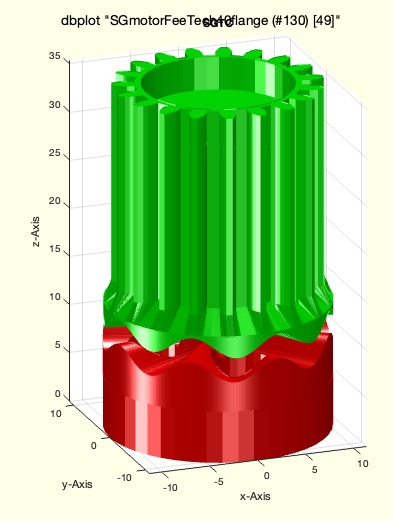
SGraamboTCPbagcutter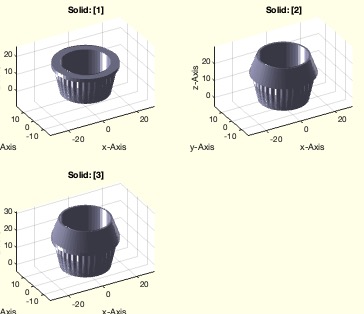
SGraamboTCPcreatefulltoolset
SGraamboTCPgearwheeldisk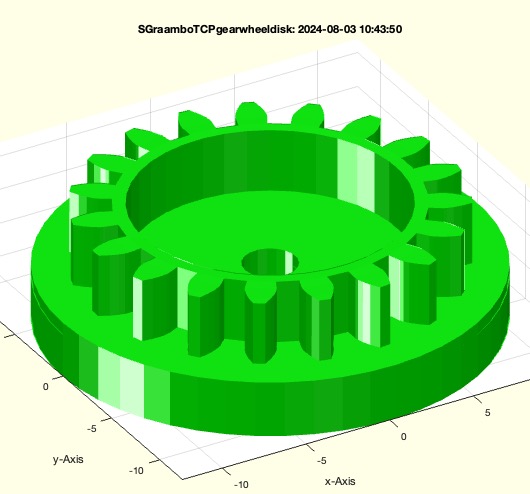
SGraamboTCPgearwheeldiskTL
SGraamboTCPknurledgearcover
SGraamboTCPknurledgearcoverTL
SGraamboTCPMagnetM22
SGraamboTCPmagnetpull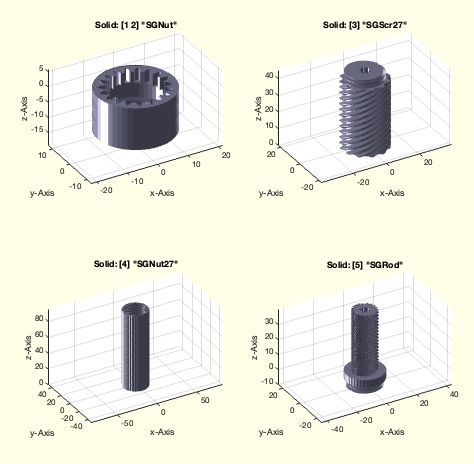
SGraamboTCProtatingrodM16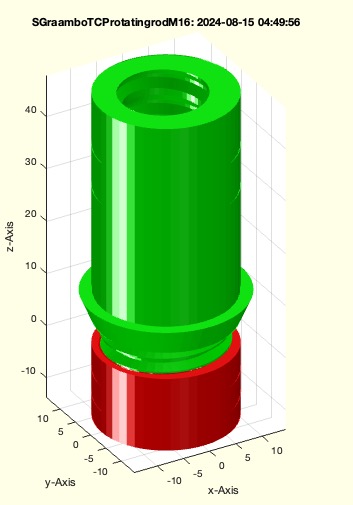
SGraamboTCPstraightmoveM16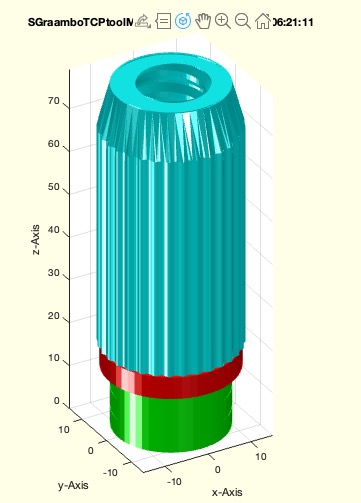
SGraamboTCPtoolM16extension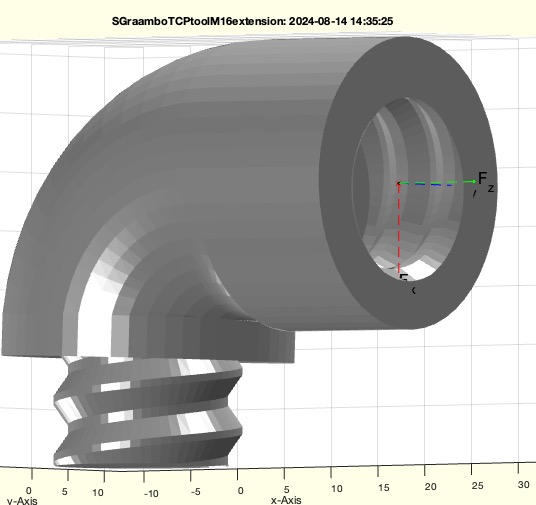
SGraamboTCPtoolM16ofCPL
SGraamboTCPtoolstand