The newest version is SG-Lib 5.5.4 (23.09.2025) compiled for 2024b Update6(Download 236MB incl. html documentation)
The current version is SG-Lib 5.5 (02.09.2025) compiled for 2024b Update6 (Download)
The complete documentation can be also downloaded from this page. It is not part of the toolbox file.
An older version is SG-Lib 5.4 (01.10.2024) compiled for 2024a Update1 (Download)
An older version is SG-Lib 5.3 (01.10.2023) compiled for 2023a Update5
An older version is SG-Lib 5.2 (04.01.2023) compiled for 2021b Update3
An older version is SG-Lib 5.1 (22.02.2022) compiled for 2021b Update3, it also runs on 2020b Update 6!
An older version is SG-Lib 5.0 (28.02.2021) compiled for 2020a Update6, it also runs on 2020b Update 5!
Version 5.4 is currently being developed and tested at the TU Munich!
DOWNLOAD DOCUMENTATION
The structure of the library is a rough draft to be found in the following document: SG-Lib Structure (PDF)
Download 2020-08-30 SG-Lib_4.9.1_Reference_List_by_Name_small.pdf
Download 2020-08-30_SG-Lib_4.9.1_Reference_List_by_Date_small.pdf
Download 2020-08-30_SG-Lib_4.9.1_Reference_Help_Text_by_Name_small.pdf
Download 2020-08-30_SG-Lib_4.9.1_Reference_Help_Text_by_Date_small.pdf
DOWNLOAD TOOLBOX
All SG-Lib Toolboxes and SG-Lib 5.0 can be downloaded at Matlab Central at GitHub
for educational non-profit purpose and has always a limited license. It is expected that the Toolbox will be continuously extended at least until the year 2035.
How to install the Toolbox on your computer:
1. Make sure that at least 2021b is used for SG-Lib 5.2
1. Make sure that at least 2021b is used for SG-Lib 5.1
1. Make sure that 2020a/b is used for SG-Lib 5.0
1. Make sure that 2019a is used for SG-Lib 4.9 - Matlab 2020a changed a lot in SimScape objects
2. Click on the link below to download the Toolbox file
3. Double click on downloaded file or agree to install as Matlab-Toolbox
4. After installing SG-Lib make sure by setpath that it is at the top position of the path
5. Test Toolbox by command: >> VLFLlicense, PLcircle(10)
6. Download the tutorials to get familiar with the toolbox
Download SG-Lib 4.9.1 (compiled using R2020a, 30.08.2020) => recommended
Download SG-Lib 4.9 (compiled using R2019a, 24.08.2020) - not recommended
Download SG-Lib 4.8 (compiled using R2019a, 06.01.2020)
Download SG-Lib 4.7 (compiled using R2019a, 19.08.2019)
Download SG-Lib 4.6 (compiled using R2019a, 13.06.2019)
Download SG-Lib 4.5 (compiled using R2018a, 24.04.2019)
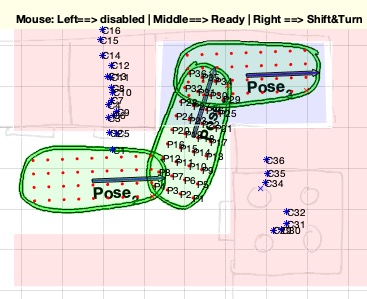
The following screenshots show examples of automated mechanisms and robot design using the SG-Lib: