Animated Gif (part of SG-Lib 4.6) created by:
video2animatedGIF
Kinematic Movement (part of SG-Lib 3.9) created by :
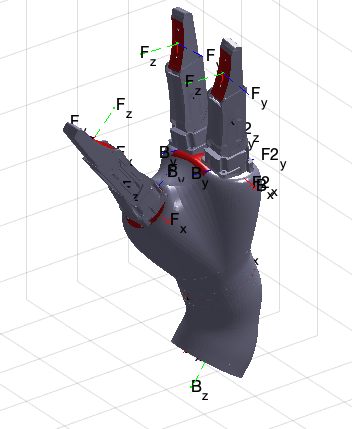
loadweb JACO_robot.mat % load JACO Geometry from TU Munich repository
JACO={JC0,JC1,JC2,JC3,JC4,JC5,JC61,JCF} % create a cell solid consisting of 8 solids
Fchain=SGTframeChain(1:7,[7 'F' 8 'B' 7 'F2' 8 'B' 7 'F3' 8 'B']) % define the kinematic chain
w1=pi/2; % define a arbitrary angle
SGn=SGTchain(JACO,[NaN -w1/3 w1 pi/3 w1 w1 pi/6],'',Fchain); % Move the solids w,r,t to the Frame Structure
SGplotalpha(SGn);
SGfigure; SGplotalpha(SGn); view(-30,30);
cla; SGTchainanimation(JACO,[NaN -w1/3 w1 pi/3 w1 w1 pi/6; [NaN -w1/3 w1 pi/3 w1 w1 pi/6] + pi],0,Fchain,50); % Move the solids w,r,t to the Frame Structure
Automated Design using SG-Lib and 3D printed using Arburg Freeformer by Andreas Schroeffer: