ipcam_2014b(n,url)- Returns images of an IP camera such as an iPhone |
 | % ipcam_2014b(n,url) - Returns images of an IP camera such as an iPhone % (by Tim Lueth, VLFL-Lib, 2015-OKT-10 as class: EXPERIMENTS) % % ======================================================================= % OBSOLETE (2017-07-14) - USE FAMILY 'ipcam' INSTEAD % ======================================================================= % % ipcam works inside of the EUDOROAM Network using the accounts of type: % gu28kix@eduroam.mwn.de. % >>> It is possible to activate the WLAN connection of the MAC computer % in addition to the Ethernet cable connection and have additional IP % address areas. % >>> The ipcam Application can be downloaded for iPhone in the App-Store % (Status of: 2017-07-14) % % Introduced first in SolidGeometry 2.7 % % See also: [ ipcam ] ; im2stereo % % ss=ipcam_2014b([n,url]) % === INPUT PARAMETERS === % n: number of desired mouse clicks to stop % url: url of ip cam server (iphone etc.) % === OUTPUT RESULTS ====== % ss: image % % EXAMPLE: Snapshot: url='http://192.168.178.67:8020/image.jpg'; % I=imread(url); implot(I) % % % Create a stereo image % fh=ipcam; X1=fh.CData; % fh=ipcam; X2=fh.CData; % I1=rgb2gray(X1); I2=rgb2gray(X2); % points1 = detectHarrisFeatures(I1); points2 = detectHarrisFeatures(I2); % % % See also: [ ipcam ] ; im2stereo % |
FLofCVL(VL,ni,at,tt)- returns the faces for a tube-style vertex list |
 | % FLofCVL(VL,ni,at,tt) - returns the faces for a tube-style vertex list % (by Tim Lueth, VLFL-Lib, 2015-OKT-04 as class: SURFACES) % % This procedure is used in SGsphere. Does work with one PL. Analyzes % itself the z-values. % The procedure expects a sorted vertex list consisting of several % succeeding polygon point list with different z-values. If just the VL % is input argument, the procedure analyzes the z-values and reconstructs % based on same z-values different levels and creates the outer walls % between those polygons. (Status of: 2015-10-04) % % [FLB,FLW,FLT,CiL,ni]=FLofCVL(VL,[ni,at,tt]) % === INPUT PARAMETERS === % VL: Vertex list % ni: Optional size list % at: optional assignment type; default is 'number' % tt: optional turning type; default is 'none' % === OUTPUT RESULTS ====== % FLB: Facet list of the walls % FLW: Facet list of the bottom % FLT: Facet list of the cover % CiL: CiL % ni: size list % % EXAMPLE: % VL=[]; for i=1:10; VL=[VL;VLaddz(PLstar(10,10),3*i)]; end; FLofCVL(VL); % |
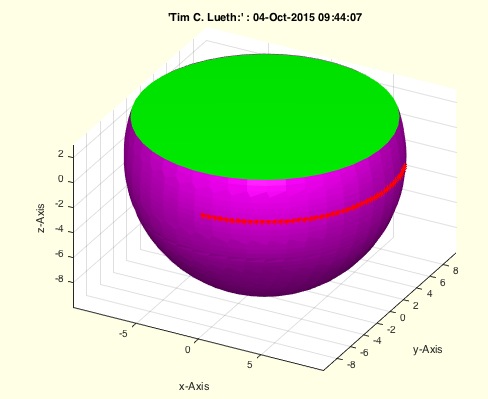
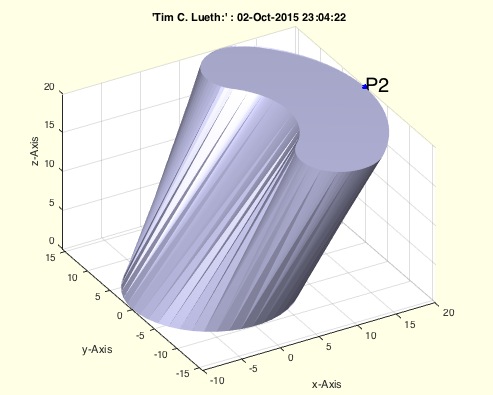
SGsphere(R,nr,wt,wb,Ry,Rz)- returns a spherical SG with minimal nr of points |
 | % SGsphere(R,nr,wt,wb,Ry,Rz) - returns a spherical SG with minimal nr of points % (by Tim Lueth, VLFL-Lib, 2015-OKT-04 as class: SURFACES) % % returns a sphere or an ellipsoid, depending on the given parameters % (Status of: 2017-05-18) % % Introduced first in SolidGeometry 2.7 % % See also: SGcone, SGbox, SGlinkage, SGtext, SGspherelink, SGarrow % % [SG,FLW,FLB,FLT]=SGsphere(R,[nr,wt,wb,Ry,Rz]) % === INPUT PARAMETERS === % R: Radius % nr: number of points; default is []; % wt: top angle; default is +pi/2 % wb: bottom angle; default is -pi/2 % Ry: Radius in Y; default is R % Rz: Radius in Z; default is R % === OUTPUT RESULTS ====== % SG: Solid Geometry % FLW: Faces of the wall, related to SG.VL % FLB: Faces of the bottom, related to SG.VL % FLT: Faces of the cover, related to SG.VL % % EXAMPLE: % SGsphere(10,[],pi/10) % [SG,FLW]=SGsphere(10,'',0); SG.FL=FLW; SGfigure(SG); view(-30,30) % [SG,FLW]=SGsphere(10,'',pi/3,-pi/3); SG.FL=FLW; SGfigure(SG); view(-30,30) % SG=SGtransR(SG,rot(pi/6,0,0)); SGfigure(SG); % % See also: SGcone, SGbox, SGlinkage, SGtext, SGspherelink, SGarrow % % % Copyright 2015-2019 Tim C. Lueth |
isint32(a)- returns true or false if a number has no fraction |
 | % isint32(a) - returns true or false if a number has no fraction % (by Tim Lueth, VLFL-Lib, 2015-OKT-04 as class: AUXILIARY PROCEDURES) % % In contrast to: isequal((rem(a,1),0) % this procedure is faster and automatically detects the limit of int32. % % Can be used for calculation of number of egdes: if ~isint32(nf); % nf=nofrd(R,nf/2); end; % % (Status of: 2015-10-04) % % b=isint32(a) % === INPUT PARAMETERS === % a: number % === OUTPUT RESULTS ====== % b: true if isequal((rem(a,1),0) % |
int32orfloat(a)- changes type to integer float is an integer |
 | % int32orfloat(a) - changes type to integer float is an integer % (by Tim Lueth, VLFL-Lib, 2015-OKT-04 as class: AUXILIARY PROCEDURES) % % this fnctn can be used to distinguish for nofrd wether the argument is % a desired point number or a desired resolution of an object. % if (mod(a,(1-1e-18))<1e-9); a=int32(a); end; [isinteger(a), isfloat(a)] % (Status of: 2020-08-28) % % Introduced first in SolidGeometry 2.7 % % See also: isinteger, isintegerbv % % a=int32orfloat(a) % === INPUT PARAMETERS === % a: float % === OUTPUT RESULTS ====== % a: same number as float or as integer % % EXAMPLE: % a= int32orfloat (pi), [isinteger(a), isfloat(a)] % a= int32orfloat (2), [isinteger(a), isfloat(a)] % % See also: isinteger, isintegerbv % % % Copyright 2015-2020 Tim C. Lueth |
size2index(ni)- converts a size list into an index list [start end] |
 | % size2index(ni) - converts a size list into an index list [start end] % (by Tim Lueth, VLFL-Lib, 2015-OKT-04 as class: AUXILIARY PROCEDURES) % % The size list contains element sizes [n1 n2 n3 n4 n5..] % The index list contains elements of type [startindex endindex] % Backwards it is: index2size = il(:,2)-il(:,1)+1 (Status of: 2015-10-04) % % il=size2index(ni) % === INPUT PARAMETERS === % ni: list of [size of element] % === OUTPUT RESULTS ====== % il: list of [startindex endindex] % % EXAMPLE: % size2index([1 3 4 3]) % |
PLminyx(PL,maxY)- returns the point with minimal y and x value |
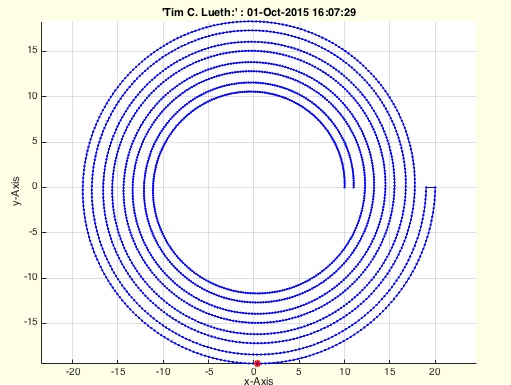 | % PLminyx(PL,maxY) - returns the point with minimal y and x value % (by Tim Lueth, VLFL-Lib, 2015-OKT-01 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 2.7 % % See also: PLminangle, PLminxy % % [P,pi]=PLminyx(PL,[maxY]) % === INPUT PARAMETERS === % PL: Point Liste % maxY: if true; we search for maximum y and maximum x % === OUTPUT RESULTS ====== % P: Point with minimal y and minimal x % pi: find index in PL % % EXAMPLE: % PLminyx(CPLspiral(10,20,8*pi)) % PLminyx(CPLspiral(10,20,8*pi),true) % [~,ci]=PLminyx(CPLB); CPLB=circshift(CPLB,-(ci-1)); % % See also: PLminangle, PLminxy % % % Copyright 2015-2021 Tim C. Lueth |
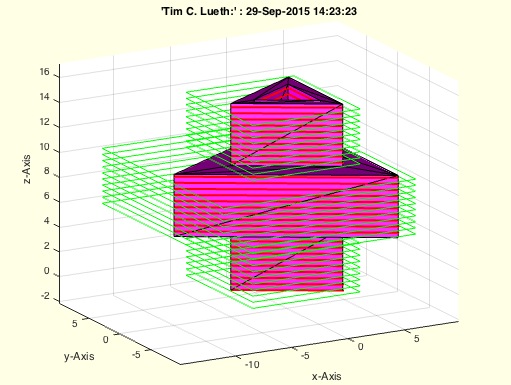
exp_2015_09_30- EXPERIMENT for a sphere with minimal number of points |
 | % exp_2015_09_30 - EXPERIMENT for a sphere with minimal number of points % (by Tim Lueth, VLFL-Lib, 2015-SEP-30 as class: SURFACES) % % In this experiment, % 1st a shape curve is calculated for the sphere % 2nd for each z-value a circle with minimal number of points is created % to create a vertex list % 3rd between two circles the walls are calculated using SGof2CPL % 4th floor and Top faces are added (Status of: 2015-10-04) % % exp_2015_09_30 % |
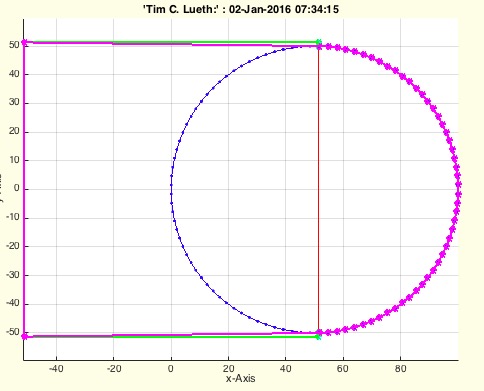
exp_2015_09_29- EXPERIMENT to show the generation of Laser-Cutter SVGs |
 | % exp_2015_09_29 - EXPERIMENT to show the generation of Laser-Cutter SVGs % (by Tim Lueth, VLFL-Lib, 2015-SEP-29 as class: EXPERIMENTS) % % exp_2015_09_29 % |
CPLofBB(BB,d)- returns a CPL around a 2D Bounding Contour BB |
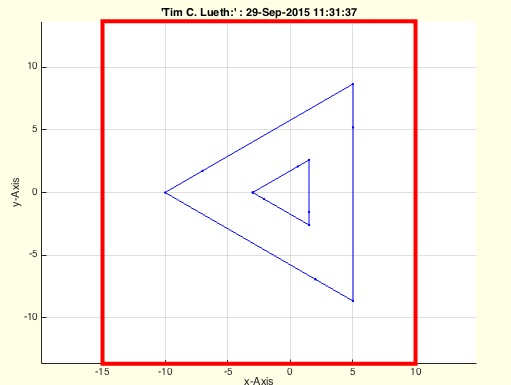 | % CPLofBB(BB,d) - returns a CPL around a 2D Bounding Contour BB % (by Tim Lueth, VLFL-Lib, 2015-SEP-29 as class: CLOSED POLYGON LISTS) % % Used for creating a surrounding BB for a CPL. (Status of: 2019-02-19) % % Introduced first in SolidGeometry 2.7 % % See also: BBofCPL, BBiscollofVL, BBofVL, SGofBB, VLFLofBB, % outboundingbox, BBofSG % % CPL=CPLofBB(BB,[d]) % === INPUT PARAMETERS === % BB: Bounding Box or CPL % d: distance around the bounding box; default is 1 % === OUTPUT RESULTS ====== % CPL: Closed Polygon Liste % % EXAMPLE: % CPLofBB(CPLslicer(SGsample(7),9)) % % See also: BBofCPL, BBiscollofVL, BBofVL, SGofBB, VLFLofBB, % outboundingbox, BBofSG % % % Copyright 2015-2019 Tim C. Lueth |
CPLofSGslice(SG,z)- returns the CPL of a sliced SG |
 | % CPLofSGslice(SG,z) - returns the CPL of a sliced SG % (by Tim Lueth, VLFL-Lib, 2015-SEP-29 as class: SLICES) % % MODIFICATION REQUIRED SINVE 2019a CPL=CPLofPL(CPLsimplify(CPL)); % % The slicer fnctns differ a little bit % CPLofSGslice - Single Slice % CPLofSGslice2 - Slices in a list of z values % CPLofSGslice3 - Slicing in 3 dimensions at the same time, several % slices (returns also CVL) % CVLofSGslices - Slices in z (return CVL) % SGslicer - Basic fnctn behind all of the above (Status of: 2019-07-01) % % Introduced first in SolidGeometry 2.7 % % See also: SGslicer, CPLofSGslice2, CPLofSGslice3, CVLofSGslices % % [CPL,warn]=CPLofSGslice(SG,[z]) % === INPUT PARAMETERS === % SG: Solid Geoemtry % z: z value for slicing % === OUTPUT RESULTS ====== % CPL: Closed Polygon List % warn: result of SGslicer % % EXAMPLE: % CPLofSGslice(SGsample(7),3) % CPLofSGslice(SGsample(39),-inf) % CPLofSGslice(SGsample(39),+inf) % % See also: SGslicer, CPLofSGslice2, CPLofSGslice3, CVLofSGslices % % % Copyright 2015-2020 Tim C. Lueth |
iscrossingCPL(CPLA,CPLB,touch)- checks crossing/touching of two CPLs |
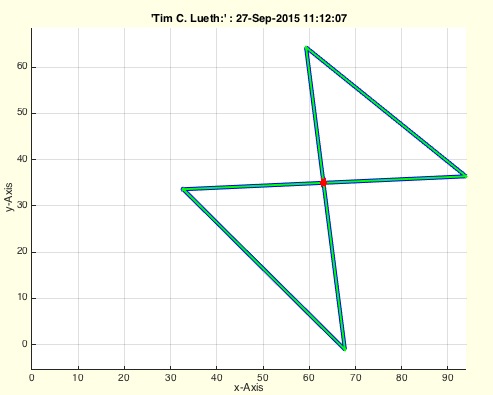 | % iscrossingCPL(CPLA,CPLB,touch) - checks crossing/touching of two CPLs % (by Tim Lueth, VLFL-Lib, 2015-SEP-27 as class: CLOSED POLYGON LISTS) % % Not optimized fnctn for use/help during development. % See also: https://de.wikipedia.org/wiki/Polygon % (Status of: 2021-12-01) % % Introduced first in SolidGeometry 2.7 % % See also: PLcross2Lines, PLcrossCPLline % % [c,pc]=iscrossingCPL(CPLA,[CPLB,touch]) % === INPUT PARAMETERS === % CPLA: Closed polygon A % CPLB: Closed polygon B % touch: check touch instead of cross; default is true % === OUTPUT RESULTS ====== % c: true/false % pc: first detected crossing point % % EXAMPLE: % PL=VLui; iscrossingCPL(PL(:,1:2),[],false) % % See also: PLcross2Lines, PLcrossCPLline % % % Copyright 2015-2021 Tim C. Lueth |
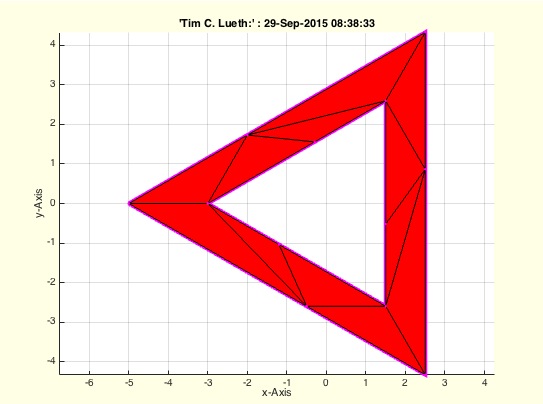
exp_2015_09_27- EXPERIMENT for systematically testing SGofCPL2z |
 | %% PUBLISHABLE EXP_2015_09_27 EXPERIMENT FOR SYSTEMATICALLY TESTING SGOFCPL2Z % (by Tim Lueth, VLFL-Lib, 2015-SEP-27 as class: EXPERIMENTS) %% % exp_2015_09_27 - EXPERIMENT for systematically testing SGofCPL2z % (by Tim Lueth, VLFL-Lib, 2015-SEP-27 as class: EXPERIMENTS) % % exp_2015_09_27 % |
CPLremnoise(CPL,r,maxw)- returns a smoother CPL |
 | % CPLremnoise(CPL,r,maxw) - returns a smoother CPL % (by Tim Lueth, VLFL-Lib, 2015-SEP-25 as class: ANALYTICAL GEOMETRY) % % Better name would be CPLremDetails % This procedure removes 'details' between two points on a closed contour % point list (CPL). Such 'details' or 'noise' can appear after merging a % half circle with a square. Suddenly a zig-zag step is part of a contour % that should have no sharp edges. % r spezifies the maximum length between 2 points % maxw spezifies the minimum angle to remove points % if maxw==0; % (Status of: 2016-01-02) % % CPLN=CPLremnoise(CPL,[r,maxw]) % === INPUT PARAMETERS === % CPL: CPL % r: minimal allowed distance between 2 points; 0.05; % maxw: noise angle; default is pi/2 -1e-5; % === OUTPUT RESULTS ====== % CPLN: CPLwithout jitter % % EXAMPLE: try: % PL=PLradialEdges(CPLspiral(10,20,2*pi,1)); CPLremnoise(PL,1) % C=CPLremnoise(C,sofrd(r)+1e-5,(2*pi+1e-5)/nofrd(r)); % % % |
CPLcopypatternPL(CPL,PL,dw)- copies a CPL at positions of a PL |
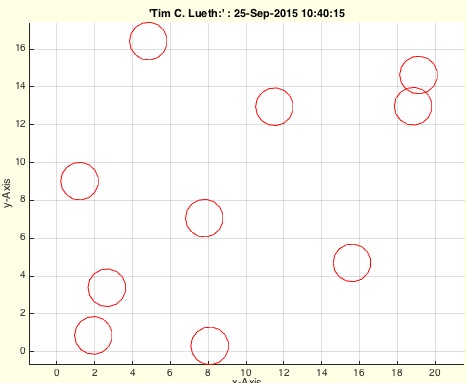 | % CPLcopypatternPL(CPL,PL,dw) - copies a CPL at positions of a PL % (by Tim Lueth, VLFL-Lib, 2015-SEP-25 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 2.7 % % See also: CPLcirclesofPL, SGpatternRotz, CPLcopypattern, SGpatternXYZ, % CPLcopyradial, CPLcopypatternTL % % CPLN=CPLcopypatternPL(CPL,PL,[dw]) % === INPUT PARAMETERS === % CPL: CPL to copy (nx2) % PL: PL of relative Positions (nx2) % dw: optional turing angle or turning array [nx1]; default is 0 % === OUTPUT RESULTS ====== % CPLN: Final CPL [nx2] % % EXAMPLE: % CPLcopypatternPL(PLcircle(1),20*rand(10,2)) % CPLcopypatternPL(PLcircle(1,4),20*rand(10,2),pi/10) % % See also: CPLcirclesofPL, SGpatternRotz, CPLcopypattern, SGpatternXYZ, % CPLcopyradial, CPLcopypatternTL % % % Copyright 2015-2021 Tim C. Lueth |
CPLspiral(RI,RO,wm,d,n)- returns a closed polygon in spiral shape |
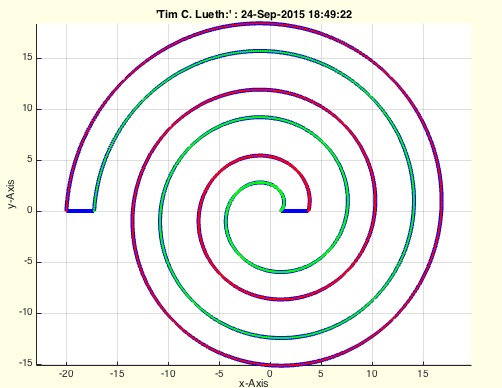 | % CPLspiral(RI,RO,wm,d,n) - returns a closed polygon in spiral shape % (by Tim Lueth, VLFL-Lib, 2015-SEP-24 as class: CLOSED POLYGON LISTS) % % PL=CPLspiral(RI,RO,[wm,d,n]) % === INPUT PARAMETERS === % RI: Inner radius % RO: Outer radius % wm: turning angle; default is 2pi % d: wall thickness; default is (RO-RI)/2/(wm/(2*pi)+1 % n: number of points; default is nofrd % === OUTPUT RESULTS ====== % PL: Point list [nx2] % |
PLspiral(RI,RO,wm,n)- return the PL of a spiral |
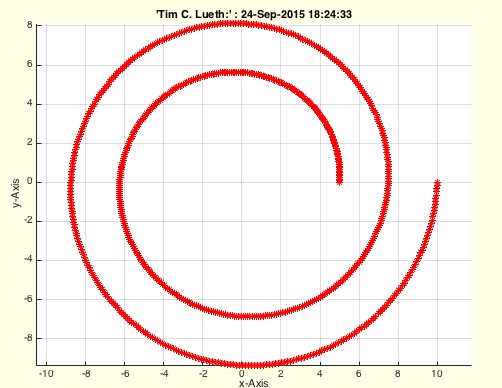 | % PLspiral(RI,RO,wm,n) - return the PL of a spiral % (by Tim Lueth, VLFL-Lib, 2015-SEP-24 as class: ANALYTICAL GEOMETRY) % % See also: PLcircle, PLcircseg, PLevolvente, PLgear, PLhelix, PLkidney, % PLrand, PLsquare, PLstar % % PL=PLspiral(RI,RO,[wm,n]) % === INPUT PARAMETERS === % RI: Inner Diameter % RO: Outer Diameter % wm: Desired angle; default is 2pi % n: number of points; default is nofrd((RO+RI)/2)/2pi*wm % === OUTPUT RESULTS ====== % PL: Point list [nx2] % % EXAMPLE: Two turn spiral % PLspiral(5,10,4*pi) % |
PLangle2(PL)- returns the angles of a points list |
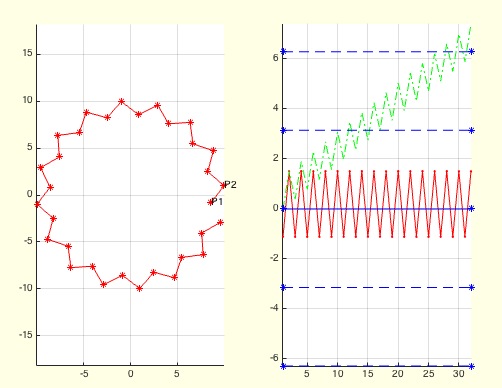 | % PLangle2(PL) - returns the angles of a points list % (by Tim Lueth, VLFL-Lib, 2015-SEP-22 as class: ANALYZING PROCEDURES) % % In contrast to VLangle, PLangle uses crossz to calculate an % orientation: Positive values are mathematical positive (right hand). % (Status of: 2017-08-12) % % Introduced first in SolidGeometry 2.7 % % See also: PLangle, VLangle, diffangle % % [w,d,nw,wi]=PLangle2(PL) % === INPUT PARAMETERS === % PL: vector list % === OUTPUT RESULTS ====== % w: angle list % d: distance list % nw: increment of angle list % wi: number of full rotations % % EXAMPLE: % [PLstar(10,10) PLangle(PLstar(10,10))/pi*180] % % See also: PLangle, VLangle, diffangle % % % Copyright 2015-2017 Tim C. Lueth |
PLcrossCPLline(CPL,pa,pb,touch,full)- return the crossing point of a CPL and a line |
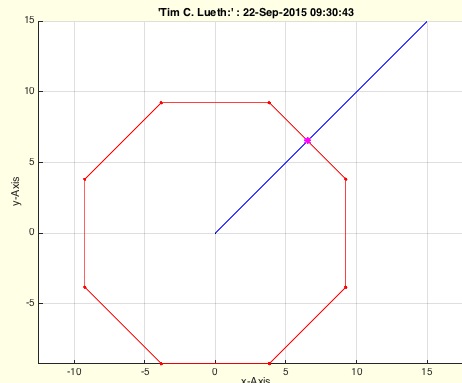 | % PLcrossCPLline(CPL,pa,pb,touch,full) - return the crossing point of a CPL and a line % (by Tim Lueth, VLFL-Lib, 2015-SEP-22 as class: ANALYTICAL GEOMETRY) % % Checks on crossings or touch (selected by parameter). % In future can deliver the full crossing list on demand (Status of: % 2021-12-01) % % Introduced first in SolidGeometry 2.7 % % See also: PLcross2Lines, iscrossingCPL, crossC2P % % [CP,k,k1]=PLcrossCPLline(CPL,pa,pb,[touch,full]) % === INPUT PARAMETERS === % CPL: Closed Polygon List % pa: line start point % pb: line end point % touch: check on touch instead of cross; default is false % full: return a full crossing point list; default is false % === OUTPUT RESULTS ====== % CP: Crossing Point % k: index in PL % k1: subsequent index in PL % % EXAMPLE: % PLcrossCPLline(PLcircle(10,8),[0 0 ],[15 15]) % PLcrossCPLline(PLcircle(10,8),[-15 -15 ],[15 15]) % PLcrossCPLline(PLcircle(10,8),[-15 -15 ],[15 15],'',true) % % See also: PLcross2Lines, iscrossingCPL, crossC2P % % % Copyright 2015-2021 Tim C. Lueth |
