SGplotalpha(SG,c,a,e)- plots a solid support directly color and alpha value |
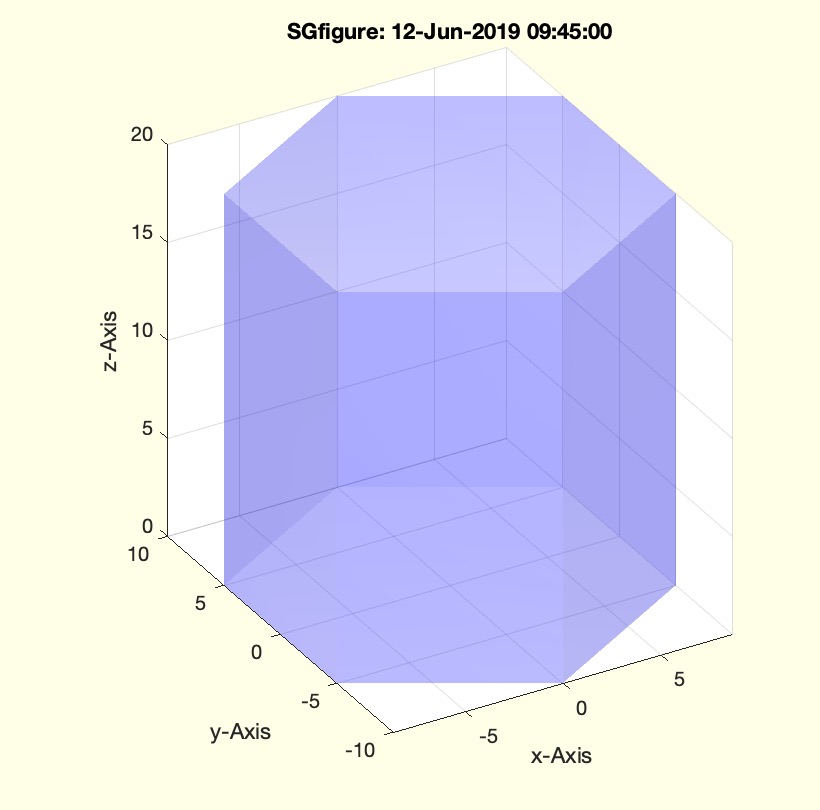 | % SGplotalpha(SG,c,a,e) - plots a solid support directly color and alpha value % (by Tim Lueth, VLFL-Lib, 2019-JUN-12 as class: USER INTERFACE) % % This fnctn was written in Tokyo visiting Hajime Asama's Lab at The % University of Tokyo (Status of: 2020-02-25) % % Introduced first in SolidGeometry 4.6 % % See also: SGplot, setplotlight, SGTplotalpha % % h=SGplotalpha(SG,[c,a,e]) % === INPUT PARAMETERS === % SG: SOlid Geometry % c: color; default is []; % a: alpha value; default is 1; % e: edge color; default is []; % === OUTPUT RESULTS ====== % h: handle to grhics object patch % % EXAMPLE: % SGfigure; view(-30,30); SGplotalpha(SGcylinder(10,20,6),'b',.2); % SGfigure; view(-30,30); SGplotalpha(SGcylinder(10,20,6),'b',.2,'r'); % cla; SGplotalpha({SGbox,SGcylinder(5)},'r',0.4,'g'); shg % % See also: SGplot, setplotlight, SGTplotalpha % % % Copyright 2019-2020 Tim C. Lueth |
SGstent(l,d,n,s,m,r)- returns a cylindric stent consisting of two spirals |
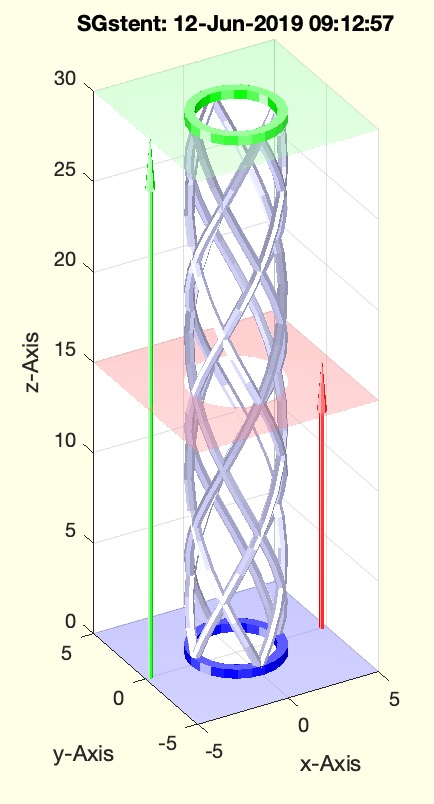 | % SGstent(l,d,n,s,m,r) - returns a cylindric stent consisting of two spirals % (by Tim Lueth, VLFL-Lib, 2019-JUN-12 as class: PARAMETRIC DESIGN) % % This fnctn uses SGspring. % This fnctn was written in Tokyo visiting Hajime Asama's Lab at The % University of Tokyo % (Status of: 2019-06-12) % % Introduced first in SolidGeometry 4.6 % % See also: VLFLspring, SGspring, VLhelix % % [SGX,SGA,SGB]=SGstent([l,d,n,s,m,r]) % === INPUT PARAMETERS === % l: length of spring % d: outer diameter of spring % n: number of windings % s: ratio of compressed spring default is 0.5 % m: number of parallel yarns % r: optional radius % === OUTPUT RESULTS ====== % SGX: Solid mesh % SGA: Bottom ring % SGB: Top ring % % EXAMPLE: % SGstent(30,10,10,.5,4); % SGstent(30,10,10,.5,1); % SGstent(30,10,10,.5,8); % SGstent(30,10,10,.5,8,.35); % SGstent(30,5,4,.5,4,.25); % % See also: VLFLspring, SGspring, VLhelix % % % Copyright 2019 Tim C. Lueth |
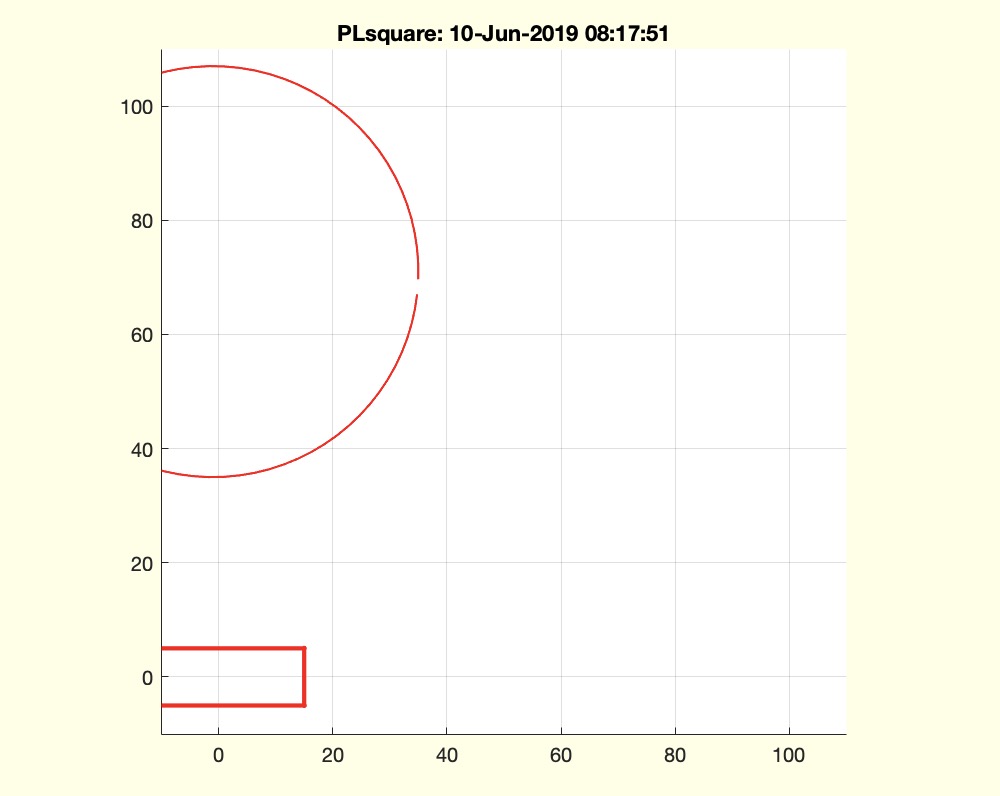
SGofCPLflat(CPL,T)- returns a SG struct of an open flat surface from a polyshape or closed polygon |
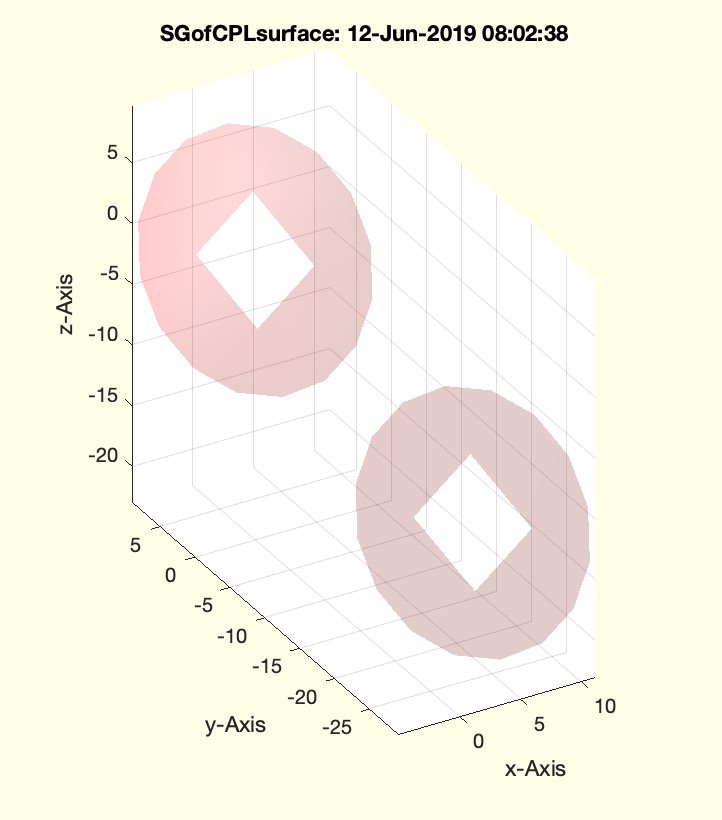 | % SGofCPLflat(CPL,T) - returns a SG struct of an open flat surface from a polyshape or closed polygon % (by Tim Lueth, VLFL-Lib, 2019-JUN-12 as class: CLOSED POLYGON LISTS) % % This fnctn does not create a watertight solid geometry but only a % surface of the shape of the polygon! % It used when a polyshape surface should be drawn in space (Status of: % 2019-06-12) % % Introduced first in SolidGeometry 4.6 % % See also: PLFLofCPLdelaunay % % SGofCPLflat(CPL,[T]) % === INPUT PARAMETERS === % CPL: Closed Polygon or Polyshape % T: vector, rotation matrix, or HT matrix to locate the surface in space % % EXAMPLE: % SGofCPLflat(PLstar(30),[0 0 10]) % SGofCPLflat(PLsquare(30),rot(pi/3)) % SGofCPLflat(PLsquare(30),rot(pi/3,-pi/3,-pi/3)) % SGofCPLflat(CPLsample(12),rot(pi/3,-pi/3,-pi/3)) % % See also: PLFLofCPLdelaunay % % % Copyright 2019 Tim C. Lueth |
SGspring(l,d,n,s,m,r)- returns a cylindric spring |
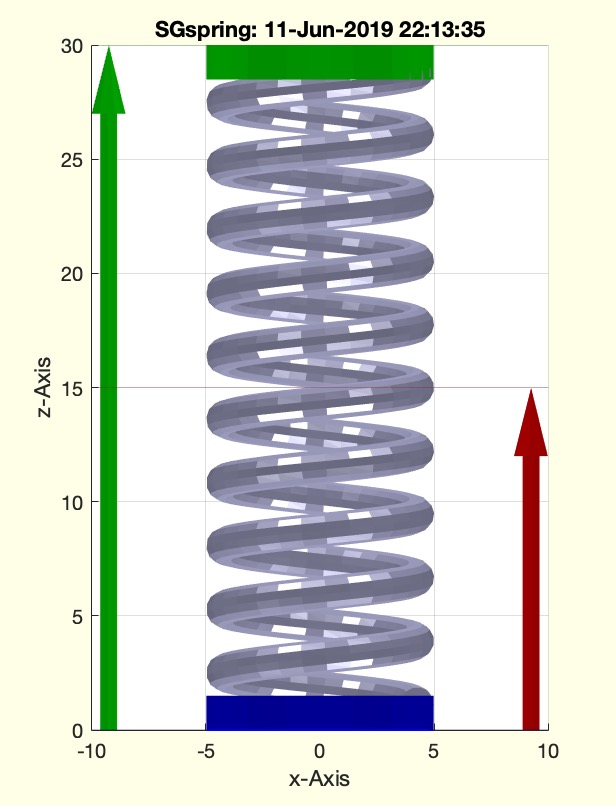 | % SGspring(l,d,n,s,m,r) - returns a cylindric spring % (by Tim Lueth, VLFL-Lib, 2019-JUN-11 as class: PARAMETRIC DESIGN) % % circular cross section is different to the former fnctn square cross % section spring of Dec 2011: VLFLspring % This fnctn was written in Tokyo visiting Hajime Asama's Lab at The % University of Tokyo % (Status of: 2019-06-12) % % Introduced first in SolidGeometry 4.6 % % See also: VLFLspring, SGstent % % [SGX,SG,SGA,SGB]=SGspring([l,d,n,s,m,r]) % === INPUT PARAMETERS === % l: length of spring % d: outer diameter of spring % n: number of windings % s: ratio of compressed spring default is 0.5 % m: number of parallel yarns % r: optional radius % === OUTPUT RESULTS ====== % SGX: % SG: % SGA: % SGB: % % EXAMPLE: % SGspring(30,10,10,.5,4); % SGspring(30,10,10,.5,1); % SGspring(30,10,10,.5,8); % SGspring(30,10,10,.5,8,.35); % % See also: VLFLspring, SGstent % % % Copyright 2019 Tim C. Lueth |
SGCLsample(Nr,T)- returns examples for the SGofCPLcommand strings |
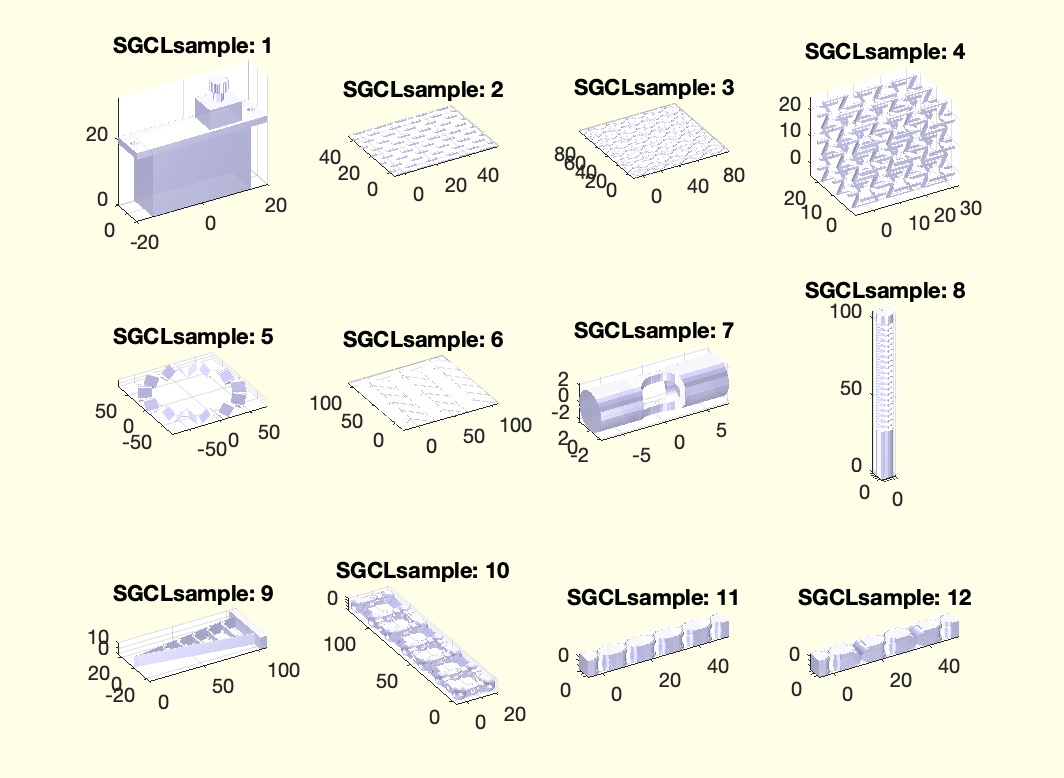 | % SGCLsample(Nr,T) - returns examples for the SGofCPLcommand strings % (by Tim Lueth, VLFL-Lib, 2019-JUN-11 as class: MODELING PROCEDURES) % % Introduced first in SolidGeometry 4.6 % % See also: CPLsample, SGsample, VLsample, PLsample, VLFLsample, % CSGsample, SGerrorsample, SGfischertechniksample, SGcmdsample % % [SG,FL]=SGCLsample([Nr,T]) % === INPUT PARAMETERS === % Nr: Number of Sample % T: % === OUTPUT RESULTS ====== % SG: Solid Geometry % FL: % % See also: CPLsample, SGsample, VLsample, PLsample, VLFLsample, % CSGsample, SGerrorsample, SGfischertechniksample, SGcmdsample % % % Copyright 2019 Tim C. Lueth |
video2animatedGIF (fname,WName,sizecr,cutt,frames,accel)- creates an animated GIF from a video file |
 | % video2animatedGIF (fname,WName,sizecr,cutt,frames,accel) - creates an animated GIF from a video file % (by Tim Lueth, VLFL-Lib, 2019-JUN-10 as class: VISUALIZATION) % % Since Peter Corke advised me to use animated GIFs for documentation, % this fnctn has been written for this purpose. Written in Tokyo visiting % Hajime Asama's Lab at The University of Tokyo. (Status of: 2019-06-26) % % Introduced first in SolidGeometry 4.6 % % See also: image2video, videoCopyCutMovies, video2video % % video2animatedGIF([fname,WName,sizecr,cutt,frames,accel]) % === INPUT PARAMETERS === % fname: Video file; default is ''=> selection by browser % WName: Name for animated GIF file; default is same as Video file name % sizecr: size columns by rows; default is unchanged; if scalar<10 => % ratio if scalar>10 =>rows % cutt: [start time end time]; default is [0 inf] % frames: fps; default is unchanged; 10 is a useful value; % accel: integer acceleration factor > 1; default is 1 % % EXAMPLE: Just try % video2animatedGIF('','',[1024 768],[2 3]) % select any video and cut between 2 and 3 seconds % video2animatedGIF('','',0.5,[2 3]) % scaling ration 0.5 % video2animatedGIF('','',720 lines,[2 3]) % use 720 lines % video2animatedGIF('','',720 lines,[2 3],10) % use 720 lines and 10 fps % % See also: image2video, videoCopyCutMovies, video2video % % % Copyright 2019-2020 Tim C. Lueth |
PLofhandle(h,ascell)- returns the point list of different graphics objects in gca |
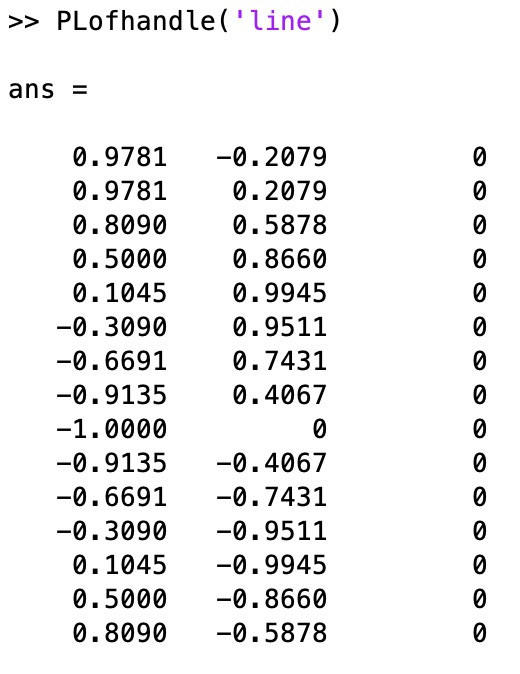 | % PLofhandle(h,ascell) - returns the point list of different graphics objects in gca % (by Tim Lueth, Video-Lib, 2019-JUN-10 as class: USER INTERFACE) % % written in Tokyo visiting Hajime Asama's Lab at The University of Tokyo % (Status of: 2019-06-11) % % Introduced first in SolidGeometry 4.6 % % See also: SGfigure, hideingca, findingca % % [PLs,hp]=PLofhandle(h,[ascell]) % === INPUT PARAMETERS === % h: handle or string such as 'point', 'line', 'text', 'polygon', 'patch' % etc. % ascell: result as separeted list; default is false % === OUTPUT RESULTS ====== % PLs: Point lists % hp: handle to objects if input handle was a string % % EXAMPLE: % SGfigure; PLcircle(1) % PLofhandle('line') % % See also: SGfigure, hideingca, findingca % % % Copyright 2019 Tim C. Lueth |
findingca(gotype,);- select graphics objects of a specific type |
 | % findingca(gotype,); - select graphics objects of a specific type % (by Tim Lueth, Video-Lib, 2019-JUN-10 as class: USER INTERFACE) % % a modified version of hideingca and support also the type 'point' % written in Tokyo visiting Hajime Asama's Lab at The University of Tokyo % (Status of: 2019-06-10) % % Introduced first in SolidGeometry 4.6 % % See also: SGfigure, hideingca % % h=findingca(gotype,[]); % === INPUT PARAMETERS === % gotype: type such as 'point', 'line', 'text','polygon' , 'ptach' etc. % === OUTPUT RESULTS ====== % h: handle to object % % EXAMPLE: % SGfigure; PLplot(PLcircle(100)); % shg; hideingca('line','invi');pause(.5); hideingca('line','visi'); % SGfigure; CPLplotasPS(PLcircle(10)); CPLplot(PLcircle(20),'b-'); textVL(PLcircle(15)); SGplot(SGbox(5)); findingca('patch') % % See also: SGfigure, hideingca % % % Copyright 2019 Tim C. Lueth |
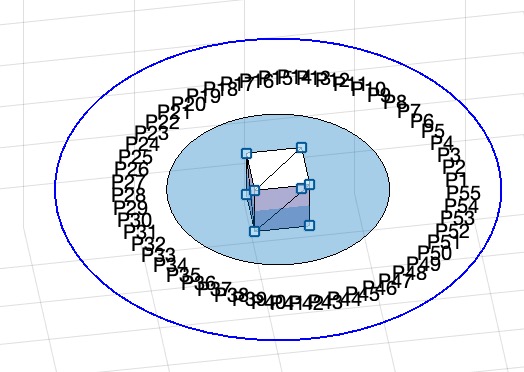
PLcircleui- returns a PL for a circle interactively defined |
 | % PLcircleui - returns a PL for a circle interactively defined % (by Tim Lueth, VLFL-Lib, 2019-JUN-10 as class: CLOSED POLYGON LISTS) % % written in Tokyo visiting Hajime Asama's Lab at The University of Tokyo % (Status of: 2019-06-20) % % Introduced first in SolidGeometry 4.6 % % See also: PLcircle, VLui, CPSlineui, CPLui, CPSui, PLui, PLsquareui, % VLFLui, SGui, CPLsplitui, Poseofimageui, Poseui, SGTui % % PL=PLcircleui % === OUTPUT RESULTS ====== % PL: Point List % % EXAMPLE: % PLsquare(30,10); PLcircleui % interactively creating a Point list for a circle % % See also: PLcircle, VLui, CPSlineui, CPLui, CPSui, PLui, PLsquareui, % VLFLui, SGui, CPLsplitui, Poseofimageui, Poseui, SGTui % % % Copyright 2019 Tim C. Lueth |
CPLofPosefourbarshaping(PS,aps,SCPL,rel,XCPLW,XCPLA,XCPLR,XCPL1)- returns collision free path shaped contour for a specific fourbar linkage |
 | % CPLofPosefourbarshaping(PS,aps,SCPL,rel,XCPLW,XCPLA,XCPLR,XCPL1) - returns collision free path shaped contour for a specific fourbar linkage % (by Tim Lueth, VLFL-Lib, 2019-JUN-03 as class: MECHANICAL PROCEDURES) % % This is a full implementation of original Posefourbarshaping introduced % SG-Lib in 4.5 (Status of: 2021-11-18) % % Introduced first in SolidGeometry 4.6 % % See also: exp_2019_04_16_Shape, exp_2019_03_28_Shape, % exp_2018_12_20_cuttingshape % % CPL=CPLofPosefourbarshaping(PS,[aps,SCPL,rel,XCPLW,XCPLA,XCPLR,XCPL1]) % === INPUT PARAMETERS === % PS: Pose and fourbar linkage struct including GPL and GAL % aps: [solution, limiting order] % SCPL: Contour to shape % rel: CPL is moved relative to 'P'ose, 'C'rank, or 'Swing' or 'WORLD' % XCPLW: Static obstacles in the environment % XCPLA: Obstacle contours attached to Pose % XCPLR: Obstacle contour moved with crank % XCPL1: Obstacle contour moved with swing % === OUTPUT RESULTS ====== % CPL: Collision free contour % % EXAMPLE: % PosereadAPD('/Volumes/LUETH-WIN/MATLAB_files_for_experiments/basecabinet_new.APD');PS=ans; % PS=checkfourbar3Poseattachpermutation(PS,'',20) % PS.CPLE=CPLfillinside(PS.CPLE); % CPLofPosefourbarshaping(PS,[546]) % Full path of the fourbar % CPLofPosefourbarshaping(PS,[546,123]) % limited to poses 123 % %% TRY WITH 546 and 153 % CPLofPosefourbarshaping(PS,[546,123],'','E',''); PS.CPLE=ans; % Shape of effektor % CPLofPosefourbarshaping(PS,[546,123],'','C','',PS.CPLE); PS.CPLC=ans; % Shape of crank % CPLofPosefourbarshaping(PS,[546,123],'','S','',PS.CPLE,PS.CPLC); PS.CPLS=ans; % Shape of swing % CPLofPosefourbarshaping(PS,[546,123],'','W','',PS.CPLE,PS.CPLC,PS.CPLS); % Work Space % % % See also: exp_2019_04_16_Shape, exp_2019_03_28_Shape, % exp_2018_12_20_cuttingshape % % % Copyright 2019-2021 Tim C. Lueth |
Posefourbarselectcouplercurve(PS,dim,rots,CPLR,CPL1);- selects coupler courves based on the coupler curve |
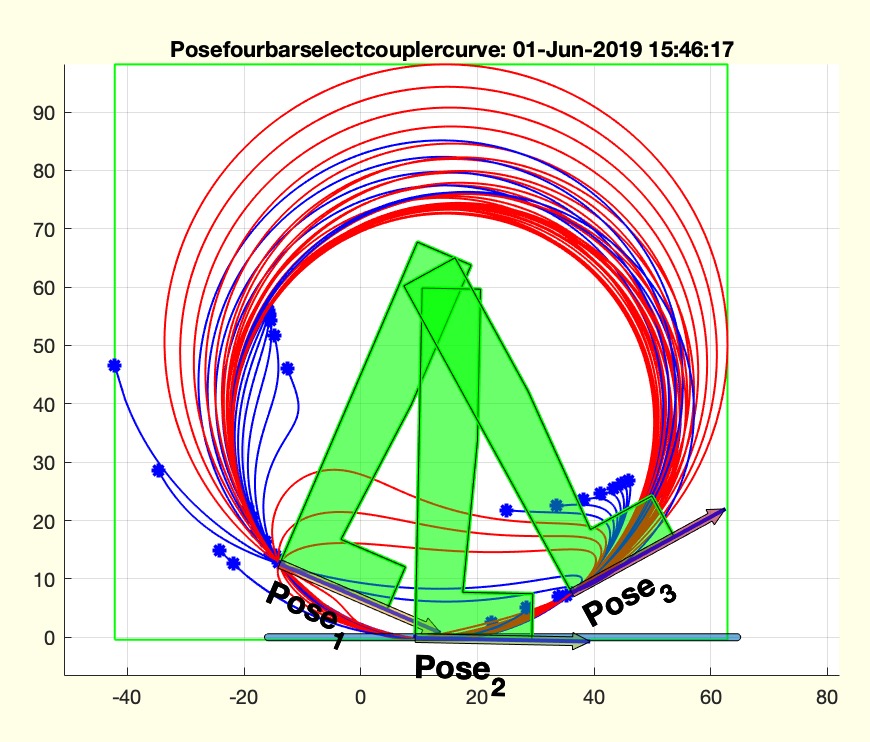 | % Posefourbarselectcouplercurve(PS,dim,rots,CPLR,CPL1); - selects coupler courves based on the coupler curve % (by Tim Lueth, VLFL-Lib, 2019-MAI-28 as class: KINEMATICS AND FRAMES) % % This fnctn was implemented during discussions with Alexandra Mercader % and improved during the Mathworks Research Summit in Newton/Boston % Tim should contact Marco Riani from Univ. of Parma to lean about the % documentation creation tool % Peter Corke recommended to switch to Github (Status of: 2019-06-01) % % Introduced first in SolidGeometry 4.6 % % See also: Posefourbarselectui, PosefourbarselectAP % % [PS,gapi]=Posefourbarselectcouplercurve(PS,[dim,rots,CPLR,CPL1]); % === INPUT PARAMETERS === % PS: Pose struct including CPLE, GPL, GAL % dim: number of curves, or limits of the curve, or enclosing contour % rots: true = full rotation, false = no rotation, default is both % CPLR: Area for Crank Base Point; default is not limits % CPL1: Area for Swing Base Point; default is CPLR % === OUTPUT RESULTS ====== % PS: Pose with only the slelected solutions left % gapi: index list of the solutions in GAL that were selected % % EXAMPLE: % clear PS % PS.CPLE=[ 0,0; 0,38; 0,60; 10,60; 10,34; 8,8; 20,8; 20,0]; % PS.A=[ -13.888,12.554; 9.336,-0.147; 36.205,7.592; ]; % PS=Posetransui(PS) % PS.B=[ -12.968,12.160; 10.336,-0.167; 37.082,8.072; ]; % SGfigure; Poseplot(PS); % PS=checkfourbar3Poseattachpermutation(PS,'',15) % Posefourbarselectcouplercurve(PS) % % See also: Posefourbarselectui, PosefourbarselectAP % % % Copyright 2019 Tim C. Lueth |
SGofPosefourbar(PS,ap,lim,roi)- returns a fourbar linkage geometry for a given attachment point solution |
 | % SGofPosefourbar(PS,ap,lim,roi) - returns a fourbar linkage geometry for a given attachment point solution % (by Tim Lueth, VLFL-Lib, 2019-MAI-26 as class: KINEMATICS AND FRAMES) % % Introduced first in SolidGeometry 4.6 % % See also: SGfourbarlinkage % % [SGM,SGA]=SGofPosefourbar(PS,[ap,lim,roi]) % === INPUT PARAMETERS === % PS: Pose struct including PS.GPL and PS.GAL % ap: solution number of PS % lim: optional limitation of pose order % roi: [outer and inner radius and slot size [ro ri si] % === OUTPUT RESULTS ====== % SGM: Solid Geometries mounted % SGA: Solid Geometries ready for printing % % EXAMPLE: % clear PS % PS.CPLE=[ 0,0; 0,38; 0,60; 10,60; 10,34; 8,8; 20,8; 20,0]; % PS.A=[ -13.888,12.554; 9.336,-0.147; 36.205,7.592; ]; % PS=Posetransui(PS) % PS.B=[ -12.968,12.160; 10.336,-0.167; 37.082,8.072; ]; % SGfigure; Poseplot(PS); % PS=checkfourbar3Poseattachpermutation(PS,'',20); PS.GAL=PS.GAL(PS.GAL(:,6)==0,:); % SGofPosefourbar(PS,118) % % See also: SGfourbarlinkage % % % Copyright 2019 Tim C. Lueth |
retainfields(S,L)- retains a list of fields from a struct |
 | % retainfields(S,L) - retains a list of fields from a struct % (by Tim Lueth, VLFL-Lib, 2019-MAI-26 as class: LANGUAGE PROCEDURES) % % Introduced first in SolidGeometry 4.6 % % See also: stripfields, rmfield, isfield % % S=retainfields(S,[L]) % === INPUT PARAMETERS === % S: struct % L: List of field names as varargin % === OUTPUT RESULTS ====== % S: struct with removed fields % % EXAMPLE: % S.A=1; S.B=2; S.C=3; S.D=4 % stripfields(S,'A','C','B') % retainfields(S,'A','C','B') % % See also: stripfields, rmfield, isfield % % % Copyright 2019 Tim C. Lueth |
SGplotcell(SG,c,w)- plot a cell list solid in different colors |
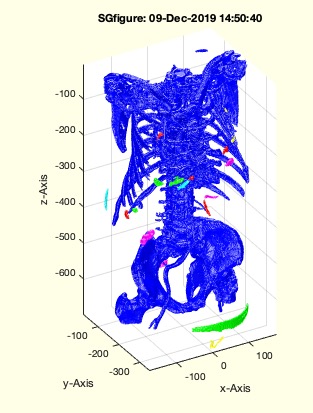 | % SGplotcell(SG,c,w) - plot a cell list solid in different colors % (by Tim Lueth, VLFL-Lib, 2019-MAI-26 as class: SURFACES) % % it plots until the facet difference is less than 1e-4 (Status of: % 2019-12-09) % % Introduced first in SolidGeometry 4.6 % % See also: SGsurfacessort, SGsurfaces, SGsurfaceplot, SGsurfaceplot, % SGplotsurfaces % % h=SGplotcell(SG,[c,w]) % === INPUT PARAMETERS === % SG: cell list of solid % c: color % w: width % === OUTPUT RESULTS ====== % h: handle to plot % % See also: SGsurfacessort, SGsurfaces, SGsurfaceplot, SGsurfaceplot, % SGplotsurfaces % % % Copyright 2019 Tim C. Lueth |
fprintfvec2 (f,s,X)- prints vectors in a way that it can used in code generation |
 | % fprintfvec2 (f,s,X) - prints vectors in a way that it can used in code generation % (by Tim Lueth, VLFL-Lib, 2019-MAI-24 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.6 % % See also: fprintfvec, str2codelines, sprintfvec % % fprintfvec2([f,s,X]) % === INPUT PARAMETERS === % f: file pointer; default is '' % s: format string % X: number % % EXAMPLE: % fprintfvec2('%.3f',[1 2 3; 4 5 6]) % % See also: fprintfvec, str2codelines, sprintfvec % % % Copyright 2019-2020 Tim C. Lueth |
CPLfillgap(CPL,d)- creates a contour that fills a another or several contours |
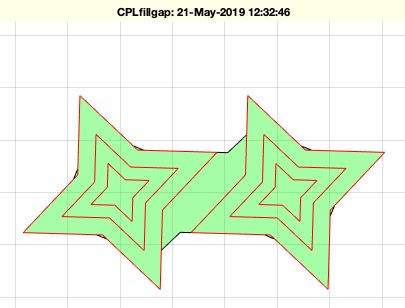 | % CPLfillgap(CPL,d) - creates a contour that fills a another or several contours % (by Tim Lueth, VLFL-Lib, 2019-MAI-21 as class: CLOSED POLYGON LISTS) % % The fnctns are based on the planar CPLfnctns % - CPLconvexhullfillgap - closes gaps and try to find a SINGLE OUTLINE % contour % - CPLoutlinecontour - just returns ALL OUTLINE contours % - CPLfillgap -just fillgapsb etween contours (Status of: 2020-08-29) % % Introduced first in SolidGeometry 4.6 % % See also: CPLconvexhull, CPLconvexhulldelaunay, delaunayofCPL, % CPLharbour, CPLfillin, CPLfillinside, CPLoutlinecontour, % CPLconvexhullfillgap % % CPLN=CPLfillgap(CPL,[d]) % === INPUT PARAMETERS === % CPL: Closed Polygon List % d: gap distance to bridge; by default 1% of maximum size length % === OUTPUT RESULTS ====== % CPLN: new polygon % % EXAMPLE: % CPLfillgap(CPLsample(14),3); % CPLfillgap(CPLsample(19),3); % CPLfillgap(CPLsample(21),3); % % See also: CPLconvexhull, CPLconvexhulldelaunay, delaunayofCPL, % CPLharbour, CPLfillin, CPLfillinside, CPLoutlinecontour, % CPLconvexhullfillgap % % % Copyright 2019-2020 Tim C. Lueth |
CPLfillinside(CPL,Amin,Asam)- creates a contour that fills a another or several contours |
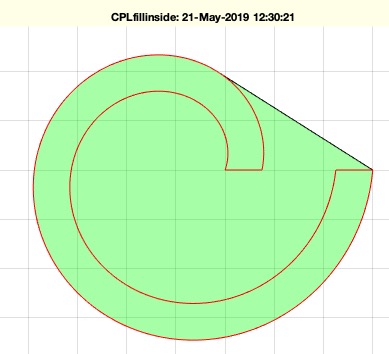 | % CPLfillinside(CPL,Amin,Asam) - creates a contour that fills a another or several contours % (by Tim Lueth, VLFL-Lib, 2019-MAI-21 as class: CLOSED POLYGON LISTS) % % Mainly the same as CPLfillin % Find out the difference to CPLfillinside % CPSplot(CPLfillinside(CPLsample(12))) % CPSplot(CPLofouterregionboundary(CPLsample(12))) (Status of: 2021-12-01) % % Introduced first in SolidGeometry 4.6 % % See also: CPLconvexhull, CPLconvexhulldelaunay, delaunayofCPL, % CPLharbour, CPLfillin, CPLfillgap, CPLofouterregionboundary % % CPLN=CPLfillinside(CPL,[Amin,Asam]) % === INPUT PARAMETERS === % CPL: Closed Polygon List % Amin: Minimum surface to be interested % Asam: percentage of maximum area ; default a=90%, 0.9 % === OUTPUT RESULTS ====== % CPLN: inverse polygon % % EXAMPLE: % CPLfillinside(CPLsample(14)); % CPLfillinside(CPLsample(19)); % CPLfillinside(CPLsample(21)); % % See also: CPLconvexhull, CPLconvexhulldelaunay, delaunayofCPL, % CPLharbour, CPLfillin, CPLfillgap, CPLofouterregionboundary % % % Copyright 2019-2021 Tim C. Lueth |
PLofPosecentrodes(PS,aps,npnt,ncur)- returns fixed centrode (Rastpolbahn) and moving centrode (Gangpolbahn) of a fourbar linkage solution |
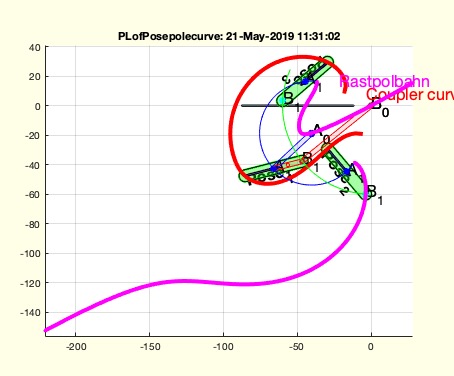 | % PLofPosecentrodes(PS,aps,npnt,ncur) - returns fixed centrode (Rastpolbahn) and moving centrode (Gangpolbahn) of a fourbar linkage solution % (by Tim Lueth, VLFL-Lib, 2019-MAI-21 as class: KINEMATICS AND FRAMES) % % Fixed Centrode (Rastpolbahn) and Moving Centrode (Gangpolbahn) describe % two parts of a rolling joint and can be determined for each % fourbar-linkage. The rolling joint can very well illustrate the % movement of the fourbar-linkage. (Status of: 2019-05-22) % % Introduced first in SolidGeometry 4.6 % % See also: PLofPosecouplercurve, Posefourbarplotcouplercurve, % checkfourbar3Poseattachpermutation, FourBarLinkageofCouplercurve % % LITERATURE: % - https://commons.wikimedia.org/wiki/Category:Centrodes % % [PLP,PL0,T0,wcr,TA0,TB0,TA1,TB1]=PLofPosecentrodes(PS,[aps,npnt,ncur]) % === INPUT PARAMETERS === % PS: Pose incl. GPL and GAL % aps: index in GAL or [iA iB] for GAL % npnt: number of points of the curve % ncur: number of curves desired; default=0 (Pose Coupler Curve);(will be % removed) % === OUTPUT RESULTS ====== % PLP: Point list of Coupler Points Movement % PL0: Transformation matrix list of Coupler Points Movement % T0: angle list of crank returned by invkinplan2 % wcr: Transformation matrix list of joint A0 (only rotation) % TA0: Transformation matrix list of joint B0 (only rotation) % TB0: Transformation matrix list of Attachment point A1 (circular % Movement) % TA1: Transformation matrix list of Attachment point B1 (circular % Movement) % % EXAMPLE: % PS=Posesample(7);PS.CPLE = PLsquare([6 4]); checkfourbar3Poseattachpermutation(PS); PS=ans; % close all; PLofPosecentrodes(PS,56); % % See also: PLofPosecouplercurve, Posefourbarplotcouplercurve, % checkfourbar3Poseattachpermutation, FourBarLinkageofCouplercurve % % % Copyright 2019 Tim C. Lueth |
Poseoffourbarlinkage(L1,L2,R,D,ebow,segm,np,TPB)- creates a Pose struct with 3 or more poses for given fourbar linkgae parameters L1, L2, R, D/[A0;B0] |
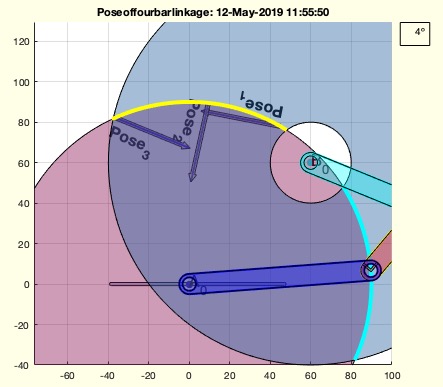 | % Poseoffourbarlinkage(L1,L2,R,D,ebow,segm,np,TPB) - creates a Pose struct with 3 or more poses for given fourbar linkgae parameters L1, L2, R, D/[A0;B0] % (by Tim Lueth, VLFL-Lib, 2019-MAI-12 as class: KINEMATICS AND FRAMES) % % The resulting struct contrains of % PS.A Pose starting point % PS.B Pose ending points % PS.GPL Pose solution list for A1 and B1, i.e. 2 Point rel. to Origin % PS.GAL Pose attachment point solution for A1 and B1 % PS.CPLE Minimal Contour for Coupler that fulfills A1 and A2 % PS.A0 Crank Base Point % PS.B0 Swing Base Point % PS.A1 Crank Attachment Location in Pose 1 % PS.B1 Swing Attachment Location in Pose 1 (Status of: 2019-05-12) % % Introduced first in SolidGeometry 4.6 % % See also: SGfourbarlinkage, Posesample, Poseplot % % PS=Poseoffourbarlinkage(L1,L2,R,D,[ebow,segm,np,TPB]) % === INPUT PARAMETERS === % L1: Length of Swing % L2: Length of Coupler % R: Radius of Crank % D: Distance or [A0; B0] % ebow: 1== ellbow down; 2== ellbow up % segm: segment 1 or segment 2 % np: number of poses; default is 3 % TPB: Pose relative to A1; 'A1','B1', dx, [dx dy]; Pose of P rel. to B1; % not implemented yet % === OUTPUT RESULTS ====== % PS: Pose struct PS.A, OS.B, PS.A0, PS.B0 % % EXAMPLE: % Poseoffourbarlinkage(60,40,90,[0 0;60 60]); % SGfourbarlinkage(60,40,90,[0 0;60 60]); % Poseoffourbarlinkage(60,40,90,85,2,1,'',TofR(rot(pi/2),[0 50])) % % See also: SGfourbarlinkage, Posesample, Poseplot % % % Copyright 2019 Tim C. Lueth |
str2codelines(Str,ll,fle)- creates from long string, several lines that can be used as matlab code |
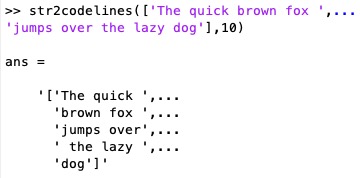 | % str2codelines(Str,ll,fle) - creates from long string, several lines that can be used as matlab code % (by Tim Lueth, VLFL-Lib, 2019-MAI-10 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.6 % % See also: SGofCPLcommand, fprintfvec2, fprintfvec, sprintfvec % % [clstr]=str2codelines(Str,[ll,fle]) % === INPUT PARAMETERS === % Str: string to break into lines % ll: maximum length of line % fle: reduced number of chars if 1st line or string % === OUTPUT RESULTS ====== % [clstr]: String broken into code lines % % EXAMPLE: % str2codelines(['The quick brown fox ',... % 'jumps over the lazy dog'],10) % str2codelines(['b 5 5,h 4.5,roty 90,move -4.5 0 0,save B,enter,b 3 5,enter,d 5 1.5 0,+,h',... % ' 1.5,save A,move 1.5 0 -2.5,dups 1 1 2 2,+,enter,d 2.5 3 0,h 10,move 0 0',... % ' -5,-,enter,load A,rotz 180,move 4.5 0 -']) % % % See also: SGofCPLcommand, fprintfvec2, fprintfvec, sprintfvec % % % Copyright 2019-2021 Tim C. Lueth |
PofBB(VLO,loc,turn)- returns a point relative to the bounding box |
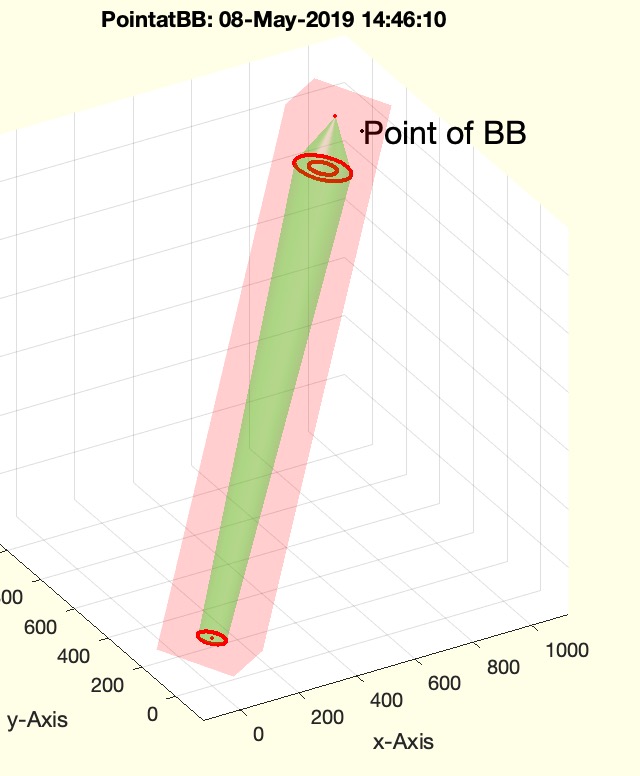 | % PofBB(VLO,loc,turn) - returns a point relative to the bounding box % (by Tim Lueth, VLFL-Lib, 2019-MAI-08 as class: VERTICES / CLOUDS) % % The locations are defined to the optimized bounding box: % x = longest dimension, y = second, z = shortest dimension % '-' => minimal value of dimension % 'c' => center of dimension % '+' => maximal value % loc = 'ccc' => center of bounding box % loc = '-cc' => center of plane at lower x value of BB % loc = 'c+-' => center of the longest axis of BB butoutside (Status of: % 2019-05-10) % % Introduced first in SolidGeometry 4.6 % % See also: SGconvexhullVL, SGofBB, BBofVL, textBB % % p=PofBB(VLO,[loc,turn]) % === INPUT PARAMETERS === % VLO: Vertex list, or SG or graphics handle % loc: location string 3 chars '+", '-', 'c' % turn: minimal bounding box; relative to % === OUTPUT RESULTS ====== % p: coordinate relative to bounding biox % % EXAMPLE: % PofBB(SGarrow([0 0 0;1000 1000 1000]),'+-+',true) % PofBB(SGarrow([0 0 0;1000 1000 1000]),'ccc',true) % % % See also: SGconvexhullVL, SGofBB, BBofVL, textBB % % % Copyright 2019 Tim C. Lueth |
SGconvexhullVL(VL)- creates the convex hull of a cloud of vertices |
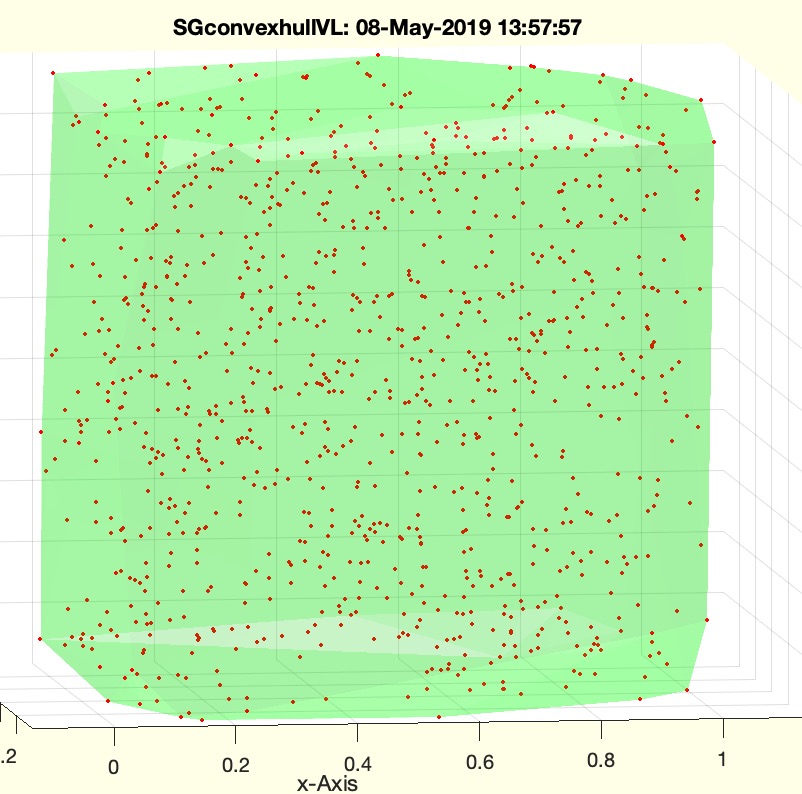 | % SGconvexhullVL(VL) - creates the convex hull of a cloud of vertices % (by Tim Lueth, VLFL-Lib, 2019-MAI-08 as class: SURFACES) % % just delaunay traingulation of the vertex list % SG.VL=VL; [SG.FL]=convexHull(delaunayTriangulation(SG.VL)); % not the same as: SGconvexHull % % (Status of: 2019-05-08) % % Introduced first in SolidGeometry 4.6 % % See also: SGconvexHull % % SG=SGconvexhullVL(VL) % === INPUT PARAMETERS === % VL: Vertex List or SG % === OUTPUT RESULTS ====== % SG: Solid Geometry % % EXAMPLE: % SGconvexhullVL(rand(1000,3)) % SGconvexhullVL(SGarrow([0 0 0;100 100 100])) % % See also: SGconvexHull % % % Copyright 2019 Tim C. Lueth |
textBB(VLO,STR,loc,c,s)- writes a text at specified position relative to bounding box |
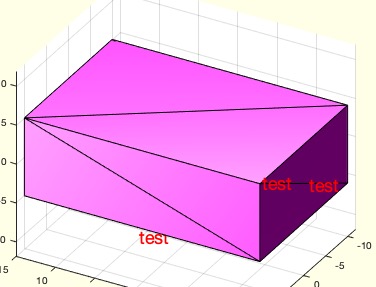 | % textBB(VLO,STR,loc,c,s) - writes a text at specified position relative to bounding box % (by Tim Lueth, VLFL-Lib, 2019-MAI-08 as class: USER INTERFACE) % % The locations are defined to the optimized bounding box: % x = longest dimension, y = second, z = shortest dimension % '-' => minimal value of dimension % 'c' => center of dimension % '+' => maximal value % loc = 'ccc' => center of bounding box % loc = '-cc' => center of plane at lower x value of BB % loc = 'c+-' => center of the longest axis of BB butoutside % (Status of: 2019-05-10) % % Introduced first in SolidGeometry 4.6 % % See also: PofBB, textT, textP, textCVL, textVLFL, VLFLfaceNormalplot % % [h,p]=textBB(VLO,[STR,loc,c,s]) % === INPUT PARAMETERS === % VLO: Vertex List or SG or graphics handle % STR: String % loc: location "+cc" or "c+-" % c: color; default is red % s: size; default is 12 point % === OUTPUT RESULTS ====== % h: handle % p: point of text % % EXAMPLE: % SGfigure; VLFLplotlight(1,1); SG=SGarrow([0 0 0;100 100 100]); h=SGplot(SG,'m',0.1); % textBB(h,'test','c+-','r',18) % textBB(SG,'test','c+-','r',18) % textBB(SG,'test','c+-','r',18) % % See also: PofBB, textT, textP, textCVL, textVLFL, VLFLfaceNormalplot % % % Copyright 2019 Tim C. Lueth |
SGfourbarhullplate(ARCR,ARC1,ARCB,roi,h)- returns the hull shapes of crank, and swing |
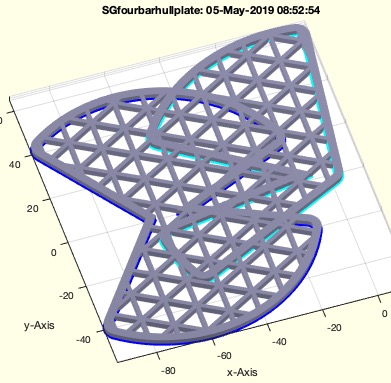 | % SGfourbarhullplate(ARCR,ARC1,ARCB,roi,h) - returns the hull shapes of crank, and swing % (by Tim Lueth, VLFL-Lib, 2019-MAI-05 as class: EXPERIMENTS) % % Introduced first in SolidGeometry 4.6 % % See also: CPLfourbarlinkagehull, SGfourbarplate % % SG=SGfourbarhullplate(ARCR,ARC1,ARCB,roi,[h]) % === INPUT PARAMETERS === % ARCR: Hull of crank movement % ARC1: Hull of swing movement % ARCB: Contour to connect base points of crank and swing % roi: outer and inner radius if link geoemtry % h: heiht; default is [roi(1)/2] % === OUTPUT RESULTS ====== % SG: Solid Geometry % % EXAMPLE: % CPLfourbarlinkagehull (60,40,100,60,'',1); % CPLfourbarlinkagehull (60,40,50,60,'',1); % [ARCR,ARC1,ARCB]=CPLfourbarlinkagehull (60,40,50,60,'',2); roi=[5 3] % SGfourbarhullplate(ARCR,ARC1,ARCB,roi); % % See also: CPLfourbarlinkagehull, SGfourbarplate % % % Copyright 2019 Tim C. Lueth |
CPLfourbarlinkagehull(L1,L2,R,D,roi,eb,wres)- returns the hull shapes of crank, and swing |
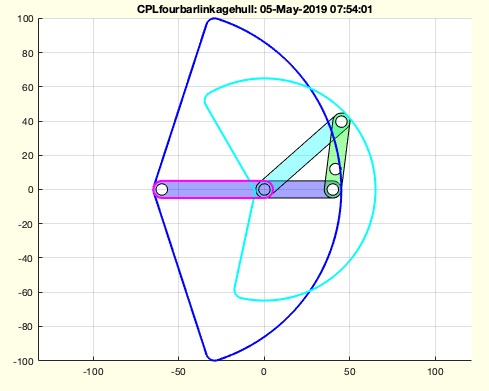 | % CPLfourbarlinkagehull(L1,L2,R,D,roi,eb,wres) - returns the hull shapes of crank, and swing % (by Tim Lueth, VLFL-Lib, 2019-MAI-05 as class: ANALYTICAL GEOMETRY) % % [L1,L2,R,D] ==> fourBarLinkageplot, fourBarLinkageplotanimui, % CPLfourbarlinkagehull % [A0,B0,A1,B1] ==> CPLfourbarlinkage, PLofFourbarcouplercurve % (Status of: 2019-05-06) % % Introduced first in SolidGeometry 4.6 % % See also: fourBarLinkageplot, SGfourbarhullplate, SGfourbarplate % % [ARCR,ARC1,ARCB]=CPLfourbarlinkagehull(L1,L2,R,D,[roi,eb,wres]) % === INPUT PARAMETERS === % L1: Length of Swing % L2: Length of Coupler % R: Radius of Crank % D: Distance between Swing and Crank % roi: outer and inner radius if link geoemtry % eb: 1=ellbow down; 2=ellbow up % wres: optional angle area to check % === OUTPUT RESULTS ====== % ARCR: Hull of crank movement % ARC1: Hull of swing movement % ARCB: Contour to connect base points of crank and swing % % EXAMPLE: % CPLfourbarlinkagehull (60,40,100,60,'',1); % CPLfourbarlinkagehull (60,40,50,60,'',1); % CPLfourbarlinkagehull (60,40,50,60,'',2); % % See also: fourBarLinkageplot, SGfourbarhullplate, SGfourbarplate % % % Copyright 2019-2021 Tim C. Lueth |
shiftindexofinvkinplan2(rs)- analyzses the real solution index of invkinplan2 and returns shift index and solution tbale |
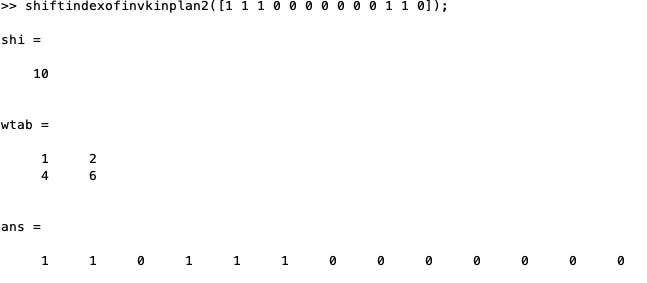 | % shiftindexofinvkinplan2(rs) - analyzses the real solution index of invkinplan2 and returns shift index and solution tbale % (by Tim Lueth, VLFL-Lib, 2019-MAI-05 as class: AUXILIARY PROCEDURES) % % It is possible to use % - shiftindexofinvkinplan2 to detect the angle areas of invkinplan2 for % a point list % - checkfourbarsegment to detect the general limits of the crossing % circles in invkinplan2 % (Status of: 2019-05-12) % % Introduced first in SolidGeometry 4.6 % % See also: invkinplan2, miofPLA0B0, realfourbarsolutions, invkinplan2, % checkfourbarsegment, wofcross2circ % % [shi,wtab]=shiftindexofinvkinplan2(rs) % === INPUT PARAMETERS === % rs: reals solution index of invkinplan2 % === OUTPUT RESULTS ====== % shi: shift indexe for circshift (rs,-shi) % wtab: angle access table (start end) % % EXAMPLE: % shiftindexofinvkinplan2([1 1 1 0 0 0 0 0 0 0 1 1 0]); % [W1,W2,B1,B2,rs,Ai]=invkinplan2(L1,L2,[R A0-B0 n]) % Ai=Ai+B0; B1=B1+B0; B2=B2+B0; % [ii,a]=shiftindexofinvkinplan2(rs) % rs=circshift(rs,-ii); % Ai=circshift(Ai,-ii); wc=circshift(wc,-ii); % W1=circshift(W1,-ii); W2=circshift(W2,-ii); % B1=circshift(B1,-ii); B2=circshift(B2,-ii); % % See also: invkinplan2, miofPLA0B0, realfourbarsolutions, invkinplan2, % checkfourbarsegment, wofcross2circ % % % Copyright 2019 Tim C. Lueth |
wofcross2circ(A0,B0,r1,r2)- just returns the angles of the two crosspoints |
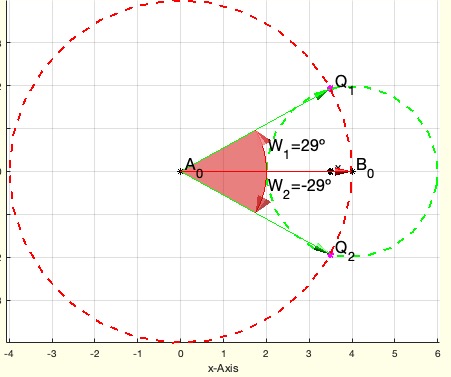 | % wofcross2circ(A0,B0,r1,r2) - just returns the angles of the two crosspoints % (by Tim Lueth, VLFL-Lib, 2019-MAI-03 as class: ANALYTICAL GEOMETRY) % % Introduced first in SolidGeometry 4.5 % % See also: cross2circ % % [w1,w2,dw,Q1,Q2]=wofcross2circ(A0,B0,r1,r2) % === INPUT PARAMETERS === % A0: Center of circle A % B0: Center of circle B % r1: radius of circle A % r2: radius of circle B % === OUTPUT RESULTS ====== % w1: absolute angle of Q1 angle relative to A0 % w2: absolute angle of Q2 angle relative to B0 % dw: angle of direction B0-A0 % Q1: cross point 1 % Q2: cross point 1 % % EXAMPLE: try % wofcross2circ([0 0],[4 0],4,2) % 2 Solutions % wofcross2circ([0 0],[4 0],2,2) % 1 Solution % wofcross2circ([0 0],[4 0],1,6) % No Solution % % See also: cross2circ % % % Copyright 2019 Tim C. Lueth |
SGfourbarplate(D,roi,h,s,sdate,siz)- returns a base plate for a fourbar linkage experiment |
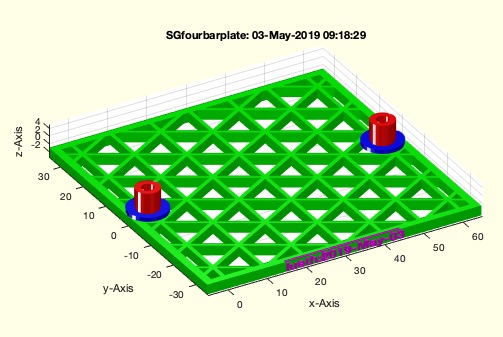 | % SGfourbarplate(D,roi,h,s,sdate,siz) - returns a base plate for a fourbar linkage experiment % (by Tim Lueth, VLFL-Lib, 2019-MAI-02 as class: PARAMETRIC DESIGN) % % In case that instead of a simple distance a complete set of (L1;L2;R;D) % is used to describe the fourbar linkage, the plate is designed using % (Status of: 2019-05-05) % % Introduced first in SolidGeometry 4.6 % % See also: SGsnaprivet, CPLlinkofPL, SGofCPLz, SGfourbarhullplate, % CPLfourbarlinkagehull % % SG=SGfourbarplate([D,roi,h,s,sdate,siz]) % === INPUT PARAMETERS === % D: Distance between A0 and B0 or [L1;L2:R;D;[eb]] % roi: outer and inner diameter of the links % h: height of the links % s: step size % sdate: true = attach date % siz: size of board % === OUTPUT RESULTS ====== % SG: Solid Geometry of board, pins, and date string % % EXAMPLE: % SGfourbarplate % SGfourbarplate ([60,40,50,60]); % SGfourbarplate ([60,40,50,60,1]); % SGfourbarplate ([60,40,50,60,2]); % % % See also: SGsnaprivet, CPLlinkofPL, SGofCPLz, SGfourbarhullplate, % CPLfourbarlinkagehull % % % Copyright 2019 Tim C. Lueth |
SGsnaprivet(d,h,n,F,s,sl)- returns a solid geometry for a snap rivet |
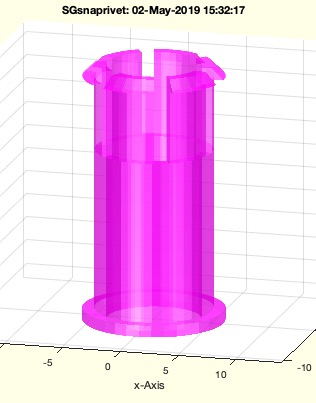 | % SGsnaprivet(d,h,n,F,s,sl) - returns a solid geometry for a snap rivet % (by Tim Lueth, VLFL-Lib, 2019-MAI-02 as class: PARAMETRIC DESIGN) % % mainly the same as VLFLsnaprivet of 2013 July. % If there is no force specified, the snap ribved is designed only wrt % geoemetric conditions (Status of: 2020-09-18) % % Introduced first in SolidGeometry 4.6 % % See also: VLFLsnaprivet, SGbending, lofbendinggirder, sofbendinggirder, % rofcircbend, bofbendinggirder, Fofbendinggirder % % SG=SGsnaprivet([d,h,n,F,s,sl]) % === INPUT PARAMETERS === % d: diameter % h: height (without base and snaps) of single unit % n: number of units (multiplies height) % F: Push force to open solid; def= 0 N % s: base size; default is one % sl: slot size % === OUTPUT RESULTS ====== % SG: Solid Geoemtry % % EXAMPLE: % SGsnaprivet (10,10,1) % SGsnaprivet (10,10,2) % SGsnaprivet (10,10,2,0.5) % % See also: VLFLsnaprivet, SGbending, lofbendinggirder, sofbendinggirder, % rofcircbend, bofbendinggirder, Fofbendinggirder % % % Copyright 2019-2020 Tim C. Lueth |
SGfourbarlinkage(L1,L2,R,D,roi,h,eb,CPLE,CPLRx,CPL1x)- creates solid geometry parts for a given linkage |
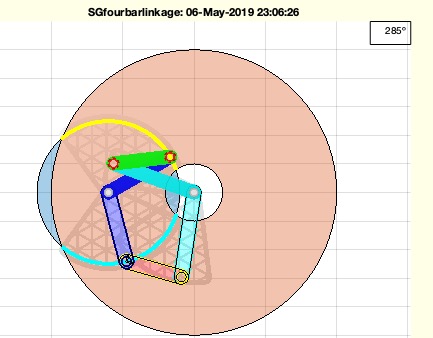 | % SGfourbarlinkage(L1,L2,R,D,roi,h,eb,CPLE,CPLRx,CPL1x) - creates solid geometry parts for a given linkage % (by Tim Lueth, VLFL-Lib, 2019-MAI-01 as class: SURFACES) % % started 2016-12-27 but finally implemented for SG-Lib 4.6 % 2021-01-16 Printer independent by slfit for AG-Lib 5.0 % (Status of: 2019-05-06) % % Introduced first in SolidGeometry 4.6 % % See also: SGfourbarplate, SGsnaprivet, CPLlinkofPL % % [SGM,SGAll]=SGfourbarlinkage(L1,L2,R,D,[roi,h,eb,CPLE,CPLRx,CPL1x]) % === INPUT PARAMETERS === % L1: Length of Swing % L2: Length of coupler % R: Length of Crank % D: Distance between Base points of Swing and Crank % roi: [ro [ri]], outer radius, inner radius % h: height; default is ro % eb: ellbow configuration 1/2 % CPLE: % === OUTPUT RESULTS ====== % SGM: Solid Geometry of all Parts mounted % SGAll: Solid Geometry of all Parts packed % % EXAMPLE: % SGfourbarlinkage(60,40,50,60,'','',1) % SGfourbarlinkage(60,40,50,10) % SGfourbarlinkage(60,40,50,100) % % See also: SGfourbarplate, SGsnaprivet, CPLlinkofPL % % % Copyright 2019-2021 Tim C. Lueth |
